จมอยู่ในเอกสารสำคัญ?
อะไรก็ตามที่เจอในระยะการยิงของท่อตอร์ปิโดของเราจะจมลง!” ตามคำสั่งของ Fuhrer ผู้บัญชาการของเรือดำน้ำนาซีตามล่าทุกอย่างโดยไม่เลือกหน้า ในช่วงสัปดาห์แรกของสงครามเรือรบอังกฤษหลายลำกลายเป็นเหยื่อ แต่เป้าหมายหลักคือการต่อสู้กับกองเรือการค้าของอังกฤษ ... 
เมื่อเริ่มมีความมืด "กองปราบใต้น้ำ" ก็โผล่ออกมาที่หัวขบวนและจากตำแหน่งบนผิวน้ำ เมื่อโซนาร์ทำอะไรไม่ถูก ส่งตอร์ปิโดเข้าปะทะกับขบวนลำเลียงที่ดำเนินไปอย่างต่อเนื่อง - แทบจะไร้จุดหมาย ในช่วงสี่เดือนแรกของสงครามเรือฝ่ายสัมพันธมิตร 810 ลำจมในปี 2483 และ 2484 - 4407 และ 4398 ตามลำดับ ในปีหน้า 2485 เรือ 8245 ลำที่มีการกำจัดรวม 6.2 ล้านตันไปที่ด้านล่าง! ..
แต่แล้วเรื่องไม่คาดฝันก็เกิดขึ้น ในตอนท้ายของปี 1942 เรือดำน้ำของนาซีที่ละเมิดลิขสิทธิ์การสื่อสารในมหาสมุทรเริ่มหายไปอย่างไร้ร่องรอย ผู้บัญชาการเรือหลายลำที่รอดชีวิตมาได้อย่างน่าอัศจรรย์เล่าว่าเกิดอะไรขึ้น ในตอนกลางคืน ท่ามกลางหมอกในสภาพที่ทัศนวิสัยไม่ดี เมื่อเรืออยู่บนผิวน้ำ จู่ๆ ก็มีเครื่องบินปรากฏขึ้นที่ระดับความสูงต่ำเหนือเรือ และแน่นอนว่าทิ้งระเบิด
เส้นโค้งความสำเร็จของกองเรือดำน้ำเยอรมันลดลงอย่างรวดเร็ว และเส้นการสูญเสียเพิ่มขึ้น หากในปี 1939 เรือดำน้ำนาซี 9 ลำเสียชีวิต ในปี 1940 1941 และ 1942 ตามลำดับ 22, 35 และ 85 ลำ จากนั้นในปี 1943 - 237 cv6นาวิกโยธิน! หากในช่วงครึ่งแรกของปี 2485 มีเรือจม 210,000 ตันสำหรับเรือดำน้ำทุกลำที่ตายแล้วอีกหนึ่งปีต่อมา - เพียง 5.5 พันตัน ในช่วงกลางเดือนพฤษภาคม พ.ศ. 2486 Doenitz รายงานต่อฮิตเลอร์:
"เรากำลังเผชิญกับวิกฤตการณ์ที่ยิ่งใหญ่ที่สุดของสงครามเรือดำน้ำ ในขณะที่ศัตรูกำลังใช้วิธีการตรวจจับแบบใหม่ ... ทำให้การต่อสู้เป็นไปไม่ได้และสร้างความสูญเสียอย่างหนักให้กับเรา"

พลเรือเอกคาร์ล โดนิทซ์
ใช่วิทยุและโซนาร์ของอังกฤษกีดกันเรือดำน้ำของนาซีจากข้อได้เปรียบหลัก - การล่องหน นักออกแบบนาซีไม่ลองอะไร กลอุบายอะไรที่พวกเขาไม่หลงระเริง! ลูกโป่งจำลองถูกยกขึ้นเหนือเรือดำน้ำโดยลาก "เป้าหมายปลอม" - เทปฟอยล์ไปด้านหลัง พวกเขาหุ้มเรือดำน้ำด้วยเกราะป้องกันซึ่งควรจะดูดซับลำแสงเรดาร์และสร้างการรบกวนในอากาศ แต่ไม่มีอะไรช่วย
ขั้นตอนแรกที่ให้ผลลัพธ์ในเชิงบวกคือข้อเสนอของนักออกแบบ G. Walter ในการสร้างระบบระบายอากาศแบบยืดหดได้ด้วยความช่วยเหลือ ซึ่งในขณะที่เรือดำน้ำจมอยู่ใต้น้ำ สามารถดูดอากาศสำหรับเครื่องยนต์ดีเซลและปล่อยไอเสียออกสู่พื้นผิวได้ อุปกรณ์นี้เรียกว่า "สนอร์กเกิล" สำหรับเรือเยอรมันในซีรีส์ VII และ IX ไม่จำเป็นต้องขึ้นผิวน้ำเพื่อชาร์จแบตเตอรี่และระบายอากาศในห้อง

และขนาดของหัวปริทรรศน์และท่ออากาศ - "สนอร์กเกิล" ก็เล็กเกินกว่าที่เรดาร์ของฝ่ายสัมพันธมิตรจะตรวจจับได้ในระยะไกล
ในขณะที่เรือดำน้ำฟาสซิสต์ที่มีอยู่กำลังติดตั้ง "สนอร์กเกิล" ที่ช่วยประหยัดอย่างเร่งรีบ ฝ่ายตรงข้ามของวอลเตอร์เริ่มโต้เถียงว่าแนวคิดของการประดิษฐ์นั้นยืมมาจากชาวอิตาลี: ย้อนกลับไปในปี 2468 พวกเขาติดตั้งท่ออากาศเข้าที่ Sirena เรือดำน้ำ แต่ใช้สำหรับช่องระบายอากาศเท่านั้น อย่างไรก็ตามจากเอกสารจดหมายเหตุเราสามารถพูดได้อย่างปลอดภัย: มีการเสนอสิ่งประดิษฐ์ที่คล้ายกับ "สน็อกเกิล" อย่างสมบูรณ์และนำไปใช้ "ในโลหะ" ผ่านการทดสอบทั้งหมดรวมถึงในสภาพการต่อสู้เกือบสามทศวรรษก่อนที่นักออกแบบนาซีจะทำงาน . และการประพันธ์เป็นของเพื่อนร่วมชาติของเรา เจ้าหน้าที่เรือดำน้ำของกองทัพเรือรัสเซีย Nikolai Gudim
การยืนยันที่พบในวรรณกรรมว่า "สนอร์กเกิล" ถูกประดิษฐ์ขึ้นและใช้งานครั้งแรกในกองเรือเยอรมันนั้นผิดพลาด อุปกรณ์ที่มีไดอะแกรมการทำงานคล้ายกันติดตั้งกับเรือดำน้ำ Keta ซึ่งพัฒนาโดยร้อยโท S.A. ยาโนวิชในปี 1904 
เซอร์เกย์ อเล็กซานโดรวิช ยาโนวิช - PL "Keta"
แนวคิดที่สมบูรณ์แบบยิ่งขึ้นคือการออกแบบของร้อยโทแห่งคณะวิศวกรเครื่องกลของกองทัพเรือ Boris Evgenievich Salyar ในระหว่างที่เขารับใช้ในวลาดิวอสต็อก เขาไปเยี่ยม Ket ซ้ำๆ และทำความคุ้นเคยกับอุปกรณ์ของมัน Salyar พัฒนาและผลิตในโรงงานของ Xenia ขนส่งอุปกรณ์ที่ช่วยให้เรือดำน้ำใช้เครื่องยนต์พื้นผิวที่ระดับความลึกปริทรรศน์ อุปกรณ์ Salyar ติดตั้งกับเรือดำน้ำของจอมพล Count Sheremetv 
การปรับปรุงอุปกรณ์เพิ่มเติมดำเนินการโดย N.A. เรากำลังพึมพำ หลังจากการเสียชีวิตของนักประดิษฐ์ในปี 2458 Gudima snorkel ได้รับการติดตั้งบนเรือดำน้ำ Wolf and Leopard ของ Baltic 
อย่างไรก็ตาม อุปกรณ์ RDP (การทำงานของดีเซลใต้น้ำ) ในรัสเซียไม่ได้รับการพัฒนาเพิ่มเติม
"แอดมินขอพิจารณา..."
ในเช้าวันที่อากาศหนาวเย็นในเดือนตุลาคม พ.ศ. 2457 ซึ่งเป็นเดือนที่สามของสงคราม มีรถยนต์คันหนึ่งขับมาถึงหน้าทางเข้ากองทัพเรือ 
นายทหารเรือร่างผอมกระโจนออกจากมันและรีบวิ่งขึ้นบันไดหินอ่อน ชายหนุ่มผมหงอกกำลังรอเขาอยู่ในห้องทำงานไม้โอ๊ค เป็นผู้ชี้ขาดชะตากรรมของกระทรวงทหารเรือ พลเรือเอก และผู้ช่วยนายพลของซาร์อีวาน คอนสแตนติโนวิช กริโกโรวิช 
ไอ.เค. กริโกโรวิช
สวัสดี Alexander Vasilyevich! - Grigorovich ชี้ไปที่เก้าอี้ที่หุ้มด้วยหนังสีเขียว - นั่งสบาย แล้วธุรกิจที่สำคัญที่สุดของคุณคืออะไร? กระจาย!
เจ้าหน้าที่หยิบซองจดหมายที่ไม่ได้ปิดผนึกอย่างเงียบ ๆ จากกระเป๋าด้านในและส่งให้ Grigorovich บนกระดาษเขียนที่พับครึ่งเป็นโครงร่างของเรือดำน้ำ แต่ไม่ใช่หนึ่งเดียวตามปกติ แต่มีกล้องปริทรรศน์สามตัว - สิ่งนี้หมายความว่า? - พลเรือเอก Essen สั่งให้ฉันนำเสนอต่อ ฯพณฯ ความคิดที่ผู้บัญชาการเรือดำน้ำ "Geskar" Gudim ผู้บัญชาการเรือดำน้ำแสดงต่อเขาเป็นการส่วนตัว

นิโคไล อเล็กซานโดรวิช กูดิม
Gudim เสนอให้ติดตั้งท่อระบายอากาศสองท่อบนเรือ ท่อหนึ่งสำหรับจ่ายอากาศให้กับเครื่องยนต์สันดาปภายใน และอีกท่อหนึ่งสำหรับก๊าซไอเสีย ในกรณีนี้ เรือสามารถแล่นอย่างลับๆ ได้โดยไม่กินไฟฟ้า - มีประสิทธิภาพ มีประสิทธิภาพมาก! ไม่ว่าในกรณีใดในแง่ยุทธวิธี - Grigorovich พูดอย่างรอบคอบ - สำหรับความเป็นไปได้ของการดำเนินการทางเทคนิค เพื่อนของฉัน คุณต้องการข้อสรุปของคณะกรรมการหลักของการต่อเรือ พลเรือเอกหยิบดินสอสีน้ำเงินหนาและขีดเขียนบนภาพร่าง: "เริ่มต้น การจัดการ, การต่อเรือ. พลเรือเอก ฉ. เอสเซ็นขอให้พิจารณาว่าเป็นไปได้หรือไม่ที่เรือดำน้ำจะมีท่อสำหรับระบายไอเสียเมื่อเรือเคลื่อนที่ใต้น้ำ ฉันไม่เห็นความยากลำบากในการทำสิ่งที่ถาม จากนี้เรือดำน้ำจะไม่ถูกทำลาย แต่ข้อดี: ความลับ - การซ่อนตัวในระยะทางหนึ่งจะทำงานได้

นิโคไล ออตโตวิช ฟอน เอสเซน
รัฐมนตรีครุ่นคิดอยู่ครู่หนึ่ง และข้อความปรากฏขึ้นที่มุมขวาบนของกระดาษ: "ความลับสุดยอด ไม่อยู่ภายใต้การส่งผู้ร้ายข้ามแดนไปยังการผลิตอื่น ๆ กระดาษมีน้ำหนักเพิ่มขึ้นทันทีและเริ่มมีการนำเข้าและส่งออกเพิ่มขึ้น
"เนื่องจากสถานการณ์ที่ไม่ชัดเจน..."
น้อยกว่าหนึ่งสัปดาห์ต่อมา พลตรี Moiseev หัวหน้าโรงงานทะเลบอลติกและทหารเรือได้รับทัศนคติของ "แผนกดำน้ำ" ของคณะกรรมการการต่อเรือหลัก "เกี่ยวกับความเร่งด่วนในการพัฒนาโครงการอุปกรณ์เพื่อให้แน่ใจว่าเรือดำน้ำจมอยู่ใต้น้ำภายใต้ เครื่องยนต์สันดาปภายใน” ทัศนคตินั้นมาพร้อมกับ "งานออกแบบ" ซึ่งกำหนดเงื่อนไขทางเทคนิคของ "อุปกรณ์" ในอนาคต เอกสารเดียวกันนี้ถูกส่งมอบให้กับ Plotnikov ประธานคณะกรรมการของ Noblessner Shipbuilding Joint-Stock Company ในสต็อกของเรือดำน้ำแบบ Bars ซึ่งสร้างเสร็จอย่างเร่งรีบ
เพียงหนึ่งสัปดาห์ต่อมา ในวันที่ 24 ตุลาคม นายพล Moiseev ได้รับทัศนคติใน "ส่วนหนึ่งของการดำน้ำลึก" พร้อมกับคำขอให้รายงาน "ข้อมูลทางเทคนิคบางอย่างที่เกี่ยวข้องกับอุปกรณ์ที่โรงงานกำลังพัฒนา" รายการคำชี้แจงเป็นพยานถึงทัศนคติเชิงปฏิบัติของวิศวกรของอู่ต่อเรือบอลติกต่องาน ข้อความที่น่าตกใจ: "... ฉันดึงความสนใจของคุณ ... เนื่องจากสถานการณ์ปัจจุบันที่มีอยู่มากมายและความแปลกใหม่ของงาน (อุปกรณ์อัตโนมัติสำหรับระบายน้ำออก) การพัฒนาขั้นสุดท้ายไม่สามารถทำได้ในเวลาอันสั้น .."
เราต้องรอคำตอบจาก Noblessner นานขึ้น: มีเพียงวันที่ 17 พฤศจิกายนเท่านั้นที่มี "การนำเสนอร่างอุปกรณ์สำหรับเรือดำน้ำเพื่อเคลื่อนที่ในตำแหน่งใต้น้ำภายใต้เครื่องยนต์ดีเซล" และภาพวาดการทำงาน บันทึกอธิบายอธิบายการทำงานของอุปกรณ์ความเรียบง่ายและความน่าเชื่อถือ แต่ระบุว่า: "... น้ำที่เข้าสู่ท่อไอเสียในปริมาณมากสามารถเข้าสู่เครื่องยนต์ได้เช่นกันซึ่งจะนำไปสู่การเสียทันที นี่เป็นจุดอ่อนเฉพาะของระบบ” และเอกสารลงท้ายดังนี้:“ ในระหว่างการเยี่ยมชมโรงงานเมื่อเร็ว ๆ นี้โดยหัวหน้าผู้อำนวยการหลักของการต่อเรือรองพลเรือเอก Muravyov โครงการได้แสดงให้เขาเห็นและ ฯพณฯ กล่าวว่าอุปกรณ์ดังกล่าวไม่เหมาะสำหรับเรือซึ่ง ตามคำสั่งของเขาเราจึงนำความสนใจของคุณมาสู่ความสนใจ
อย่างไรก็ตามนายพล Eliseev หัวหน้า "หน่วยดำน้ำลึก" ได้รวบรวมเอกสารทั้งหมดและไปที่เรือลาดตระเวน "Rurik" ไปที่ N. O. Essen เมื่อทำความคุ้นเคยกับสถานการณ์แล้ว Nikolai Ottovich ก็ต้ม: - Rutiners! พวกเขาไม่สามารถคิดเรื่องเล็ก ๆ น้อย ๆ ได้! - และเขาหันไปหาเสนาธิการ: - เชิญพลเรือตรี Levitsky ผู้เชี่ยวชาญเรือธงของกองพลเรือดำน้ำและผู้หมวด Gudim ให้พวกเขาพิสูจน์เหตุผลอย่างมีเหตุผลว่าความผิดพลาดของวิศวกรผู้สูงศักดิ์คืออะไร
ในวันขึ้นปีใหม่ พ.ศ. 2458 พลเรือเอก Essen ได้รับการนำเสนอด้วย "ทัศนคติเกี่ยวกับความไม่เหมาะสมของโครงการอุปกรณ์" ที่ผลิตโดยโรงงาน Noblessner: "อุปกรณ์ทั้งหมดเปราะบาง ... เมื่อกลิ้งกระทบคลื่นและน้ำจาก ความเครียด แรงดันไฟฟ้าจะมีนัยสำคัญจนทำให้ท่อแตก ; การยึดด้วยไม้ค้ำยันทำให้การออกแบบซับซ้อนขึ้นอย่างมากและทำให้การทำความสะอาดช้าลง ทำให้มีความน่าเชื่อถือน้อยลงในขณะเดียวกัน อุปกรณ์ขับเคลื่อนตัวหนอนที่เสนอสำหรับการเติมท่อนั้นไม่น่าเชื่อถือ การออกแบบท่อไอเสียเป็นแบบที่ว่าหากมีน้ำเข้าท่อไอเสียเพียงเล็กน้อย น้ำก็จะผ่านเข้าไปในเครื่องยนต์ดีเซลและทำให้เครื่องยนต์เสียหายได้
ในเวลาเดียวกันผู้เชี่ยวชาญเรือธงของกองพลเรือดำน้ำ - กัปตันวิศวกรเครื่องกลอันดับ 2 Evgeny Bakin กัปตันทีมวิศวกรเรือ Alexei Bokanovsky และผู้หมวดอาวุโส Nikolai Gudim นำเสนอโครงการของตนเอง: "สาระสำคัญของอุปกรณ์ทั้งหมด: ท่อทั้งสองเป็นแบบถาวร ไม่สามารถยืดหดได้ ความสูงของพวกเขามาจากดาดฟ้าประมาณ 7 ฟุต (2 ม.) เช่น ต่ำกว่าปริทรรศน์ที่ลดลงเล็กน้อย การยึดท่อทำได้ที่ด้านล่างด้วยหัวเข่าและที่ด้านบนด้วยโปรไฟล์แถบและมุมและการเข้าพัก ท่ออากาศจะทำด้วยทองแดง ความหนา (ของผนัง - P.V.) 5-6 มม. การเปลี่ยนแปลงที่สำคัญที่สุดคือ ท่อไอเสียใหม่... ท่อก๊าซไอเสียของมอเตอร์ออนบอร์ดถูกนำไปที่ส่วนบนของท่อไอเสียและจากมอเตอร์ตรงกลางไปยังส่วนล่าง... การออกแบบอุปกรณ์จะถือว่าสำหรับ การทำงานพร้อมกันของมอเตอร์ออนบอร์ดสองตัว...
ด้วยอุปกรณ์ดังกล่าว เห็นได้ชัดว่าน้ำที่ไหลเข้าท่อโดยไม่ตั้งใจ แม้ในปริมาณมาก จะไม่นำไปสู่ผลที่ไม่พึงประสงค์ ปริมาตรของท่อทั้งสองเล็กน้อย (เส้นผ่านศูนย์กลางภายใน 240 มม.) น้ำหนักของน้ำที่สามารถไหลเข้าไปได้คือประมาณ 17 ปอนด์ (หนึ่งในสี่ของตัน) ตรวจสอบได้ง่ายว่าที่หางเสือโก่ง 3-4° และที่ความเร็วต่ำ - (4.5-5 นอต) แรงพยุงหางเสือจะมากกว่าน้ำหนักของน้ำที่ไหลเข้ามาหลายเท่า
ปริมาตรที่ว่างภายในของท่อไอเสียคือประมาณ 75 ปอนด์ (1.2 ตัน) จากภาพวาดของท่อไอเสียเพื่อให้น้ำเข้าไปในกระบอกสูบจำเป็นต้องเติมท่อไอเสียอย่างน้อยหนึ่งในสามของปริมาตรนั่นคือเทลงใน 25 ปอนด์ในขณะที่ท่อก๊าซไอเสียสามารถ นำออกมาเพียงประมาณ 11 ปอนด์นั่นคือจำเป็นต้องเติมท่อให้เต็มสองครั้ง
อย่างไรก็ตามเรื่องนี้ น้ำในท่อไอเสียจะถูกควบคุมผ่านท่อที่ต่อเข้าภายในเรือและเชื่อมต่อกับท่อน้ำ ... น้ำที่เข้าไปในท่ออากาศจะระบายเข้าสู่ที่เก็บกัก ส่วนบนของท่อได้รับการปกป้องจากการเข้าไปของชิ้นไม้ลอยน้ำขนาดใหญ่ หางปลา ตะไคร่น้ำ ฯลฯ และมีฝาปิดและตะแกรงลวดแบบบาง
ในคำอธิบายผู้เขียนระบุว่า: "เมื่อร่าง ... โครงการหนึ่งในภารกิจหลักคือความจำเป็นในการหลีกเลี่ยงการเปลี่ยนแปลงที่สำคัญซึ่งอาจทำให้ความพร้อมของเรือล่าช้าและในขณะเดียวกันก็รับประกันความน่าเชื่อถือที่สมบูรณ์ ของอุปกรณ์" เนื่องจากอุปกรณ์ที่ออกแบบจะติดตั้งไม่เฉพาะกับ Shark (เรือดำน้ำ Gudima) เท่านั้น แต่ยังรวมถึงเรือที่กำลังก่อสร้างประเภท Bars และ Walrus ด้วย "เป็นที่พึงปรารถนาที่จะทำให้ท่อหดได้ในส่วนบนและ เป็นที่พึงปรารถนาที่จะนำพวกมันทั้งหมดออกมาด้านหลังตัวถังห้องโดยสารที่มั่นคงและทำปลอกหุ้มทั่วไป 
เรือดำน้ำ "ฉลาม" (ด้านหลังเรือลาดตระเวน "Rurik")
พลเรือเอก Essen พอใจและกำหนดมติ: "เพื่อทบทวน ในส่วนของการดำน้ำลึก ได้รับข้อเสนอแนะหลังจากสองสัปดาห์ในวันที่ 15 มกราคม พ.ศ. 2458: "โครงการติดตั้งท่อ ... ง่ายกว่าอย่างแน่นอนจากด้านกลไกของอุปกรณ์เดียวกันของโรงงาน Noblessner ... อุปกรณ์ที่นำเสนอโดยสำนักงานใหญ่ของ หัวหน้ากองพลจะต้องได้รับการอนุมัติและติดตั้ง” มติของ Eliseev อยู่ในเอกสาร: "ตอบตามการตรวจสอบโดยเสริมว่าตามที่กัปตันอันดับ 2 Bakin และ Markovich ดำเนินการตามโครงการนี้โดยท่าเรือของจักรพรรดิปีเตอร์มหาราชแล้ว ”

อย่างไรก็ตาม แม้จะมีความพยายามทั้งหมดของผู้เชี่ยวชาญเรือธง แต่กรณีของ "อุปกรณ์" ก็เคลื่อนไหวช้ามาก เฉพาะในวันที่ 26 พฤษภาคม "ในสภาวะสงบของทะเล" การทดสอบครั้งแรกเกิดขึ้นบนถนน Revel (ทาลลินน์) “ฉลาม” ภายใต้การบังคับบัญชาของกัปตันอันดับ 2 นิโคไล กูดิม ใน “ตำแหน่งใกล้กับการต่อสู้” โดยมี “ช่องเปิดปิดลง เคลื่อนไหวได้หลากหลาย” ไม่ว่าจะอยู่ภายใต้เครื่องยนต์ดีเซลหนึ่งหรือสองเครื่อง “เป็นเวลา 45 นาที และความเร็ว ถึง 8 นอต .. อากาศในเรือในห้องด้านหน้าค่อนข้างแย่กว่าเมื่อแล่นบนผิวน้ำโดยเปิดช่องไว้ การพิจารณาของคณะกรรมาธิการอ่านว่า: 1) ในสภาพทะเลที่สงบ เรือสามารถเดินได้อย่างอิสระภายใต้เครื่องยนต์ดีเซลหรือพุ่งเข้าใส่ในตำแหน่งใกล้กับการรบ และความมั่นคงเพียงพอและไม่จำเป็นต้องบังคับหางเสือแนวนอน 2) การแล่นเรือด้วยวิธีนี้ไม่ถือว่าเป็นอันตรายหากคุณตรวจสอบการเปลี่ยนแปลงของขอบและการลอยตัวอย่างระมัดระวัง เนื่องจากในกรณีนี้คุณสามารถมีเวลาหยุดเครื่องยนต์ดีเซลและปิดวาล์วไอเสียและระบายอากาศก่อนที่น้ำจะเข้าสู่เรือ รูท่อ
 แต่ในย่อหน้าสุดท้ายของรายงานการทดสอบเขียนไว้ว่า: "สำหรับการใช้งานจริงของการเดินใต้เครื่องยนต์ดีเซลในลักษณะที่อธิบายไว้ มีอุปสรรคร้ายแรงจากการสั่นสะเทือนที่รุนแรงของกล้องปริทรรศน์ ซึ่งไม่เพียงทำให้ใช้งานไม่ได้เท่านั้น เพื่อสังเกตขอบฟ้า แต่ยังบังคับให้ลดระดับลงเพื่อหลีกเลี่ยงความเสียหาย ด้วยเหตุนี้เรือที่ไปทางนี้จึงเกือบจะตาบอดซึ่งแน่นอนว่าไม่สามารถยอมรับได้ ไม่มีการทดสอบ "อุปกรณ์" เพิ่มเติมหรือแก้ไขข้อบกพร่องที่ระบุ "ฉลาม" ซึ่งเป็นเรือดำน้ำเพียงลำเดียวของกองเรือบอลติกที่สามารถปฏิบัติการนอกชายฝั่งของศัตรูได้ (เรือลำแรกของประเภท "บาร์" ยังอยู่ระหว่างการทดสอบการยอมรับ) อยู่ในแคมเปญการต่อสู้อย่างต่อเนื่อง และความจริงที่ว่ามีการวางแผนการแก้ไขดังกล่าวเป็นหลักฐานโดยคำพูดของ Gudim ลงวันที่ 29 สิงหาคม พ.ศ. 2458: "ปัญหานี้สมควรได้รับความสนใจต่อไปเพราะในสถานการณ์การต่อสู้การเดินหรือการบรรทุกโดยมีเพียงท่อบนพื้นผิวเป็นยุทธวิธีที่มีค่า “คุณภาพ” .. ความยากในการแก้ปัญหาอยู่ที่การวางท่อ ซึ่งควรทำด้วยความสูงพอสมควร ส่วนล่าง และวาล์วที่ปิดได้อย่างน่าเชื่อถือและรวดเร็ว บางทีปัญหานี้อาจได้รับการแก้ไขในเชิงบวกในไม่ช้า แต่เมื่อปลายเดือนพฤศจิกายน "ฉลาม" ไม่ได้กลับจากการรณรงค์ทางทหาร
แต่ในย่อหน้าสุดท้ายของรายงานการทดสอบเขียนไว้ว่า: "สำหรับการใช้งานจริงของการเดินใต้เครื่องยนต์ดีเซลในลักษณะที่อธิบายไว้ มีอุปสรรคร้ายแรงจากการสั่นสะเทือนที่รุนแรงของกล้องปริทรรศน์ ซึ่งไม่เพียงทำให้ใช้งานไม่ได้เท่านั้น เพื่อสังเกตขอบฟ้า แต่ยังบังคับให้ลดระดับลงเพื่อหลีกเลี่ยงความเสียหาย ด้วยเหตุนี้เรือที่ไปทางนี้จึงเกือบจะตาบอดซึ่งแน่นอนว่าไม่สามารถยอมรับได้ ไม่มีการทดสอบ "อุปกรณ์" เพิ่มเติมหรือแก้ไขข้อบกพร่องที่ระบุ "ฉลาม" ซึ่งเป็นเรือดำน้ำเพียงลำเดียวของกองเรือบอลติกที่สามารถปฏิบัติการนอกชายฝั่งของศัตรูได้ (เรือลำแรกของประเภท "บาร์" ยังอยู่ระหว่างการทดสอบการยอมรับ) อยู่ในแคมเปญการต่อสู้อย่างต่อเนื่อง และความจริงที่ว่ามีการวางแผนการแก้ไขดังกล่าวเป็นหลักฐานโดยคำพูดของ Gudim ลงวันที่ 29 สิงหาคม พ.ศ. 2458: "ปัญหานี้สมควรได้รับความสนใจต่อไปเพราะในสถานการณ์การต่อสู้การเดินหรือการบรรทุกโดยมีเพียงท่อบนพื้นผิวเป็นยุทธวิธีที่มีค่า “คุณภาพ” .. ความยากในการแก้ปัญหาอยู่ที่การวางท่อ ซึ่งควรทำด้วยความสูงพอสมควร ส่วนล่าง และวาล์วที่ปิดได้อย่างน่าเชื่อถือและรวดเร็ว บางทีปัญหานี้อาจได้รับการแก้ไขในเชิงบวกในไม่ช้า แต่เมื่อปลายเดือนพฤศจิกายน "ฉลาม" ไม่ได้กลับจากการรณรงค์ทางทหาร 
ไม่ว่าเธอจะถูกทุ่นระเบิดของข้าศึกระเบิดหรือเสียชีวิตจากการทิ้งระเบิดทางอากาศ ... แต่ในบรรดาบุคลากรของกองเรือนั้น รุ่นอื่นถูกใช้อย่างกว้างขวางที่สุด ในช่วงที่เกิดพายุ น้ำได้ไหลเข้าไปในเรือผ่านทาง "อุปกรณ์" ที่เสียหาย และเรือก็จมลง เรือดำน้ำรู้ดีว่า Shark นั้นติดตั้ง "นวัตกรรม" บางอย่างไว้ และ "เห็นได้ชัดว่าดำเนินการได้ไม่ดีนัก" และถ้าเป็นเช่นนั้นศัตรูที่แพร่หลายก็เข้ามามีส่วนร่วม ... พูดคุยเกี่ยวกับเรื่องนี้อย่างเปิดเผยและเพื่อหยุดข่าวลือ Grigorovich ได้แต่งตั้งการสอบสวน
คณะกรรมาธิการซึ่งประกอบด้วยผู้เชี่ยวชาญกองทัพเรือและเจ้าหน้าที่ของสำนักงานอัยการทหารเรือ เนื่องจากความขาดแคลนของข้อมูล ไม่พบหลักฐานสรุปของการก่อวินาศกรรม แต่ผู้สืบสวนอย่างพิถีพิถันได้ไปที่ด้านล่างของเอกสารที่ระบุถึงความเกี่ยวข้องในกรณีของ "อำนาจ ที่เป็น" - bigwigs อุตสาหกรรมและการเงิน ปรากฎว่าด้วยความตั้งใจของใครบางคน การเตรียม "อุปกรณ์ Gudima" ของเรือดำน้ำที่มีอยู่และอยู่ระหว่างการก่อสร้างค่อยๆ "ไร้ผล" ก่อนที่การทดสอบจะเสร็จสิ้น!
เจ้าหน้าที่ระดับสูงของคณะกรรมการหลักของการต่อเรือลงนามในเอกสารด้วยมือข้างหนึ่ง โดยพูดถึง "ข้อได้เปรียบทางยุทธวิธีที่ไม่อาจปฏิเสธได้" ของเรือดำน้ำที่ติดตั้ง "อุปกรณ์ Gudim" ขณะที่อีกฝ่ายสั่งให้ลดจำนวนเรือดำน้ำที่จะติดตั้ง! อู่ต่อเรือของรัฐที่ได้รับ "ทัศนคติ" เกี่ยวกับการพัฒนา "อุปกรณ์" อย่างอิสระตามคำสั่งของใครบางคนเพียงแค่ยื่นจดหมายโต้ตอบปัจจุบัน! และอู่ต่อเรือส่วนตัวของ Noblessner ซึ่งเป็นบริษัทร่วมทุนซึ่งทำงานด้านการก่อสร้างเรือดำน้ำโดยเฉพาะ ได้นำเสนอโครงการที่อ่อนแอโดยเจตนาก่อน จากนั้นจึงถอนตัวออกจากการมีส่วนร่วมในการพัฒนาและการใช้งาน "อุปกรณ์ Gudim"!
สมาชิกของคณะกรรมาธิการละเว้นอย่างรอบคอบจากข้อสรุปขั้นสุดท้าย และใส่เนื้อหาของการสอบสวนลงในโฟลเดอร์ ส่งเรื่องให้รัฐมนตรีว่าการกระทรวงทะเลตรวจสอบ Grigorovich เก็บโฟลเดอร์ไว้บนโต๊ะของเขาเป็นเวลาหนึ่งสัปดาห์และผู้ใต้บังคับบัญชาซึ่งคุ้นเคยกับการตัดสินใจในชั่วข้ามคืนก็สูญเสีย ในที่สุดเธอก็อยู่ในเงื้อมมือของหัวหน้าสำนักงาน ในหน้าชื่อเรื่อง ในบริษัทที่เขียนด้วยลายมือกว้างๆ ของพลเรือเอก มีการลงมติว่า "เนื่องจากขาดความชัดเจนเกี่ยวกับสถานการณ์การตายของฉลาม คดีนี้ควรยุติ ภายใต้เงื่อนไขของสงคราม วัสดุควรเก็บไว้ "เป็นความลับ" I. Grigorovich
แล้วเรื่องราวของ "อุปกรณ์ Gudim" เป็นอย่างไร - การก่อวินาศกรรมของศัตรูหรือเครื่องจักรที่ทออย่างมีเล่ห์เหลี่ยมของนักอุตสาหกรรมและนักการเงินในประเทศซึ่งกองเรือก็ถูกดึงเข้ามาด้วย?
พาเวล เวเซลอฟ นักประวัติศาสตร์
ก่อนอื่น เราทราบว่า "สน็อกเกิล" หรือที่เรียกกันในปัจจุบันว่า RDP (ย่อมาจากคำว่า "การทำงานของเครื่องยนต์ใต้น้ำ") เป็นเพียงการประคับประคองกองเรือดำน้ำเยอรมัน ซึ่งเป็นวิธีการป้องกันชั่วคราว ต่อต้านเรดาร์ของอังกฤษ เรือที่ชาร์จแบตเตอรี่ใต้ท่อหายใจใต้น้ำไม่เพียงแต่จะทำให้คนตาบอดเท่านั้น แต่ยังหูหนวกด้วยเนื่องจากเสียงที่เกิดจากการทำงานของน้ำมันดีเซล และตรวจจับตัวเองได้ง่าย - ไม่เพียง แต่ที่ส่วนหัวของ "ท่อหายใจ" ซึ่งตรวจจับโดยเรดาร์ที่มีความไว แต่ยังตรวจจับฟองคลื่นบนพื้นผิวทะเลและตามเส้นทางของไอเสีย สามารถชาร์จแบตเตอรี่ได้เฉพาะตอนกลางคืนและหยุดพักบ่อยๆ เพื่อฟังเสียงทะเลระหว่างนั้น
|
FEDOR NADEZHDIN |
เบื้องหลัง |
นอกจากนี้ การว่ายน้ำภายใต้ "สนอร์กเกิล" ยังเต็มไปด้วยปัญหาอื่นๆ แม้ว่าทะเลจะสงบ แต่บางครั้งคลื่นก็ปกคลุมศีรษะ จากนั้นระบบจ่ายอากาศจะหยุดลง และเครื่องยนต์ดีเซลยังคงดูดอากาศออกจากช่องเก็บ เพื่อให้ลูกเรือ
จากทั้งหมดนี้ เราอาจมีความเห็นว่าข้อเสนอของ Nikolai Gudim นั้นไม่ดี ดังนั้นกระทรวงการเดินเรือของรัสเซียจึงดำเนินการอย่างถูกต้องโดยละทิ้งอุปกรณ์ดังกล่าว อย่างไรก็ตามความคิดเห็นนี้ผิดพลาด จำเป็นต้องพูด พวกเขาไม่มีความคิดเกี่ยวกับพลังน้ำและเรดาร์ในยุคของสงครามโลกครั้งที่หนึ่ง เรือดำน้ำที่ติดตั้งอุปกรณ์ของ Gudim ไม่เพียงแต่จะมีการล่องหนที่มีประสิทธิภาพเท่านั้น แต่ยังมีพื้นที่นำทางในตำแหน่ง "ประชิดการรบ" เพิ่มขึ้นเป็นสิบเท่า
เหตุผลที่แท้จริงสำหรับการปฏิเสธ "อุปกรณ์" ของ Gudim นั้นยังห่างไกลจากการพิจารณากลยุทธ์ทางเรือและปัญหาทางเทคนิค พวกเขาถูกเปิดเผยโดยคณะกรรมการสอบสวนการเดินเรือสูงสุดซึ่งก่อตั้งขึ้นในปี 2460 เพื่อตรวจสอบความเชื่อมโยงของการผูกขาดกับเจ้าหน้าที่ระดับสูงของกระทรวงทหารเรือ
“มีแผนกดำน้ำเกือบทั้งหมดของกองอำนวยการหลัก เจ้าหน้าที่ระดับสูงหลายคนจากแผนกอื่น ๆ พลเรือเอก Muravyov และ Bubnov (หัวหน้าแผนกหลัก ศาสตราจารย์อีวาน บับนอฟ ผู้สร้างเรือชาวรัสเซียรายใหญ่ที่สุดคนหนึ่งปรากฏตัวที่คณะกรรมาธิการและเมื่อฉันได้รับการแนะนำให้รู้จักกับพวกเขาฉันรู้สึกว่าพวกเขาเป็นคนสำคัญ ตามปกติ ฉันลืมชื่อของพวกเขาทันที ว่าพวกเขาเป็นเทพเจ้าหลักของโลกการธนาคาร ในมื้อค่ำ พวกเขานั่งในที่แรกและแก้วใบแรกที่รัฐมนตรีช่วยยกก็เมาเพื่อสุขภาพของผู้คนในเมืองหลวง ฉัน ทั้งหมดนี้เกิดขึ้นเมื่อวันที่ 20 ธันวาคม พ.ศ. 2456 ในงานเลี้ยงกับ E. Nobel เจ้าของร่วมของ บริษัท ร่วมทุน "Noblessner" ที่เพิ่งถูกกฎหมายและ "ความช่วยเหลือ" ที่เป็นปัญหาทำให้กองเรือรัสเซียเสียค่าใช้จ่ายอย่างมาก ...

เอ็มมานูเอล ลุดวิโกวิช โนเบล
หัวหน้ากลุ่มมหาเศรษฐีทางการเงินที่มารวมตัวกันที่โนเบล ซึ่งตามคำบอกเล่าของผู้อำนวยการโรงงาน Putilov Bishlyager “สนิทกับ Grigorovich มากจนเขามีอิทธิพลต่อการแต่งตั้งสูงสุดทั้งหมดในกระทรวงนี้” คือ Mikhail Plotnikov ซึ่งเป็นหนึ่งใน ผู้อำนวยการฝ่ายบัญชีและสินเชื่อธนาคารและสมาชิกคณะกรรมการของบริษัทร่วมหุ้นหลายแห่ง ได้แก่ Lessner, Triangle, Russian Whitehead, Noblessner เป็นต้น “ประมาณปี 1911 เมื่อข่าวลือและการพูดคุยเริ่มขึ้นเกี่ยวกับโครงการต่อเรือขนาดเล็ก " เขาเขียนไว้ในคำให้การของเขา - ฉันมีความคิดที่จะสร้างโรงงานอิสระสำหรับการต่อเรือ ในเวลานั้น ฉันได้ร่างแผนโดยประมาณต่อไปนี้สำหรับการดำเนินการตามความคิดของฉัน: เนื่องจากโรงงานเหมือง Lessner ผลิตอาวุธของฉัน และโรงงานโนเบลสร้างเครื่องยนต์ดีเซล ฉันจึงตัดสินใจใช้กองกำลังที่มีอุปกรณ์พร้อมและพร้อมเหล่านี้เพื่อสร้างโรงงานสำหรับสร้าง เรือดำน้ำ การจัดโรงงานพิเศษดังกล่าวสำหรับการสร้างเรือดำน้ำนั้นต้องใช้ต้นทุนเพียงเล็กน้อย ประมาณ 5 หรือ 6 ล้าน และอาวุธและเครื่องยนต์ของเหมืองจะมาจากเลสเนอร์และโนเบล แนวคิดนี้เป็นที่ชื่นชอบของ E. Nobel ซึ่งตกลงที่จะสนับสนุนแนวคิดนี้จากด้านการเงิน ธนาคารบัญชีและสินเชื่อยังสัญญาว่าจะให้การสนับสนุนทางการเงิน ในแผนกการเดินเรือฉันคุ้นเคยกับบางตำแหน่งมาหลายปีแล้ว ... "
ศาสตราจารย์ I. Bubnov พูดถึง "คนรู้จัก" เหล่านี้ได้ดีในคณะกรรมาธิการชุดเดียวกัน: "ฉันรู้สึกทึ่งที่เขาใกล้ชิดกับชีวิตของกระทรวง สำหรับคำถามทั้งหมดที่เขาสนใจ เขารู้ทุกอย่างที่ทำและพูดในงานรับใช้ เขารู้ความคิดเห็นของผู้คนหลายสิบคนเกี่ยวกับคำถามเหล่านี้ และประเมินอิทธิพลของแต่ละคนได้อย่างแม่นยำ เห็นได้ชัดว่าเขารู้วิธีทำนายผลลัพธ์ และแน่นอน ไม่เพียงแต่เพื่อทำนายผลเท่านั้น แต่ยังเพื่อให้แน่ใจว่าปัญหาจะได้รับการแก้ไขตามที่คุณต้องการด้วยการติดสินบนอย่างทันท่วงที”
ตัวแทนของโรงงาน Putilov และ Nevsky ที่กระทรวงทหารเรือให้คำอธิบายที่ชัดเจนไม่น้อยแก่ Plotnikov: "เขาสามารถแพร่กระจายอิทธิพลดังกล่าวในกรมทหารเรือและปฏิบัติในลักษณะที่เคารพต่อพืชชนิดอื่นที่ฉันคิดว่าฉันจะไม่เป็น เข้าใจผิดถ้าฉันบอกว่าการกระจายคำสั่งต่าง ๆ โดยแผนกไปยัง บริษัท ได้ดำเนินการหากไม่ได้รับความยินยอมจากเขา จากนั้นด้วยความรู้ของเขา ไม่ว่าในกรณีใด ฉันคิดว่าหาก Plotnikov ไม่ต้องการโอนคำสั่งซื้อไปยังบริษัทใดบริษัทหนึ่ง เขาก็สามารถทำได้ จากเอกสารจดหมายเหตุวิศวกร - kalitan อันดับที่ 2 G. M. Trusov เขียนไว้ในหนังสือของเขา "เรือดำน้ำในกองทัพเรือรัสเซียและโซเวียต": "สินบนและการติดสินบนของบุคคลที่มีตำแหน่งสูงสุดในกรมการเดินเรือถูกนำมาใช้กันอย่างแพร่หลาย ธนาคารไม่เพียง แต่ติดสินบนตัวเลขดังกล่าว แต่ยังให้อาชีพที่ยอดเยี่ยมแก่พวกเขาด้วย ในปีพ. ศ. 2454 กลุ่มคนนำโดยธนาคารระหว่างประเทศซึ่ง Plotnikov อยู่ใกล้ใช้เครือข่ายดูมาและศาลที่กว้างขวางช่วยให้ I.K. Grigorovich กลายเป็นรัฐมนตรีแห่งท้องทะเล ด้วยความเชื่อมโยงกับแวดวงการเงิน สหายของรัฐมนตรีกองทัพเรือ M.V. Bubnov ซึ่งรับผิดชอบส่วนเศรษฐกิจและเทคนิคทั้งหมดของกระทรวงทหารเรือมาจากขุนนางขนาดเล็กที่ยากจนซึ่งไม่มีเลย (ไม่มีบรรพบุรุษ หรือ "ได้มา") ทรัพย์สิน - ตลอดเจ็ดปีของการให้บริการในกรมการเดินเรือมีมากกว่าหนึ่งล้านรูเบิลในบัญชีธนาคารและกลายเป็นเจ้าของที่ดินรายใหญ่

มิคาอิล วลาดิมิโรวิช บับนอฟ
คู่แข่งทั้งหมดถูกผลักเข้าไปในเบื้องหลัง พลอตนิคอฟ "ไม่สามารถต่อกรกับหัวหน้าที่ถูกตำหนิของโรงงานบอลติกหรือพลเรือเอก Muravyov หัวหน้ากิจกรรมทางเทคนิคของกองเรือที่สมมติขึ้นได้ เขาวิ่งอย่างสับสนในประเด็นทางเทคนิคและการเงินที่แปลกไปจากเขา" I. Bubnov ให้การในชั้นสอบสวน ในวันที่ 7 กันยายน พ.ศ. 2455 สองในสามของคำสั่งซื้อเรือดำน้ำ (8 จาก 12 ลำ) มอบให้กับสังคม Noblssner ที่เลิกใช้แล้ว หลังจากการทำธุรกรรมนี้สหายของรัฐมนตรีทหารเรือยอมรับหุ้น "เป็นของขวัญ" ของโรงงานแห่งอนาคตจำนวน 60,000 รูเบิล
โรงงานเช่นเดียวกับ บริษัท ร่วมหุ้นของ Noblessner มีอยู่เฉพาะบนกระดาษเท่านั้น - แม่นยำกว่าไม่ใช่แม้แต่บนกระดาษ แต่อยู่ในหัวของ Plotnikov ที่กล้าได้กล้าเสีย พระราชกฤษฎีกาอนุมัติกฎบัตรของสังคมได้ลงนามในเดือนธันวาคมและการก่อสร้างโรงงานต่อเรือเริ่มขึ้นในวันที่ 24 มีนาคม พ.ศ. 2457 เท่านั้น - หนึ่งปีครึ่งหลังจากได้รับคำสั่ง! แต่เหตุการณ์นี้ไม่ได้รบกวนเจ้าสัวการเงิน ...
ในปี 1912 เดียวกัน Plotnikov ประสบความสำเร็จในการแก้ปัญหา "ปัญหาบุคลากร" โดยดึงดูดผู้เชี่ยวชาญที่มีค่าที่สุดจากโรงงานบอลติกด้วยเงินเดือนสูง หลังจากหัวหน้าผู้ออกแบบเรือดำน้ำ ศาสตราจารย์ I. Bubnov พี่ชายของเขา Grigory ได้ย้ายไปที่ Noblessner ในตำแหน่งหัวหน้าวิศวกร จากนั้นก็เป็นช่างเขียนแบบทั้งหมด ช่างฝีมือที่มีประสบการณ์มากที่สุด ฯลฯ (ทั้งหมด 38 คน) วิศวกรหนุ่มเพียงคนเดียวที่มีประสบการณ์น้อยกว่าสามปียังคงอยู่ในแผนกดำน้ำของอู่ต่อเรือบอลติกขนาดใหญ่

Ivan Grigorievich Bubnov
พลอตนิคอฟพยายามอย่างเต็มที่เพื่อชะลอการสร้างเรือที่อู่ต่อเรือบอลติก การประชุมซึ่งมีพลตรีพุชชินเป็นประธาน ตัดสินใจ "ห้ามอู่ต่อเรือทะเลบอลติกสร้างเรือดำน้ำตามแบบของอู่ต่อเรือเอง" จากนี้ไป อู่ต่อเรือบอลติกจะใช้ได้เฉพาะแบบที่ได้รับจาก Noblessner ผ่านแผนกต่อเรือหลักเท่านั้น และแบบเหล่านั้นจงใจให้ล่าช้าเป็นเวลานาน - พลอตนิคอฟไม่สามารถปล่อยให้ผลิตภัณฑ์ของโรงงานบอลติกเหนือกว่าของเขาเอง ... 
เป็นที่ชัดเจนว่าการปรับปรุงเรือดำน้ำที่กำลังก่อสร้างที่โรงงาน Noblessner ให้ทันสมัย (เช่น การติดตั้งอุปกรณ์ Gudima) จะทำให้การเข้าประจำการล่าช้าไปหลายเดือน Plotnikov and Co. ไม่สามารถตกลงกับ "การละเมิดผลประโยชน์" ดังกล่าวได้ แต่อย่างใด ดังนั้นพวกเขาจึงต่อสู้กับอุปสรรคดังกล่าวด้วยวิธีการที่มีอยู่ (ส่วนใหญ่ผิดกฎหมาย) . ถึงกระนั้น - ท้ายที่สุดแล้วผลกำไรที่ยอดเยี่ยมของพวกเขาก็ถูกโจมตี! และเจ้าหน้าที่ของกระทรวงทหารเรือเป็นเพียงหุ่นเชิดในมือของพวกเขา ดังนั้นจึงไม่น่าแปลกใจที่ Grigorovich จะแก้ปัญหาอย่างพูดน้อยเกี่ยวกับกรณีการตายของ "ฉลาม" หรือไม่?
ดังนั้นในประวัติศาสตร์ของการประดิษฐ์ของ Nikolai Gudim จึงเป็นการยืนยันอีกครั้งว่าในการแสวงหาผลกำไรมหาศาล "ผู้มีอำนาจ" สามารถเสียสละทุกสิ่งแม้กระทั่งผลประโยชน์ของชาติในบ้านเกิดเมืองนอนของพวกเขาได้อย่างไร คุณทำอะไรได้บ้าง - นั่นคือแก่นแท้ของชนชั้นของระบบทุนนิยม
เงื่อนไขการใช้เรือดำน้ำในช่วงสงครามโลกครั้งที่สองยิ่งเข้มงวดมากขึ้นทุกปี การใช้เรดาร์จำนวนมากโดยกองกำลังต่อต้านเรือดำน้ำ การใช้เครื่องบินบรรทุกเครื่องบินเพื่อต่อสู้กับเรือดำน้ำ ทำให้การอยู่บนผิวน้ำนั้นอันตรายอย่างยิ่งทั้งกลางวันและกลางคืน ทั้งในเขตชายฝั่งและในมหาสมุทรเปิด ทั้งหมดนี้นำไปสู่ความจริงที่ว่าหากในช่วงเริ่มต้นของสงคราม ตัวอย่างเช่น เรือดำน้ำของเยอรมันอยู่ใต้น้ำนานกว่า 5% ของเวลาในทะเลเพียงเล็กน้อย ตัวเลขนี้ก็เพิ่มขึ้นเป็น 20% เมื่อสิ้นสุดสงคราม
โครงการอุปกรณ์สำหรับการทำงานของเครื่องยนต์ดีเซลใต้น้ำบนเรือดำน้ำ "ฉลาม":

1 - เพลาจ่ายอากาศ 2 - เต้าเสียบแก๊สดีเซล 3 - เครื่องเก็บเสียง; 4 - ท่อไอเสียก๊าซ; 5 - กล้องปริทรรศน์
โดยธรรมชาติแล้วเป็นไปไม่ได้ที่จะบรรลุเป้าหมายนี้ด้วยมาตรการขององค์กรล้วน ๆ จำเป็นต้องมีโซลูชันทางเทคนิคด้วย หนึ่งในสิ่งที่สำคัญที่สุดคือการใช้อุปกรณ์พิเศษสำหรับการทำงานของเครื่องยนต์ดีเซลใต้น้ำหรือเรียกสั้น ๆ ว่า RDP ในช่วงสงคราม มีเพียงเรือดำน้ำเยอรมันเท่านั้นที่ติดอาวุธ แต่หลังจากเสร็จสิ้น RDP ก็กลายเป็นคุณสมบัติบังคับของเรือดำน้ำดีเซล-ไฟฟ้าทุกลำ ประสิทธิภาพของอุปกรณ์นี้สามารถตัดสินได้อย่างน้อยจากข้อเท็จจริงนี้ เรือดำน้ำ U-977 ภายใต้การบังคับบัญชาของ Schaeffer ซึ่งออกจากนอร์เวย์ในทะเลในวันก่อนการยอมจำนนของเยอรมนีหลังจากได้รับคำสั่งให้กลับไปที่ฐานเพื่อยอมจำนนจึงตัดสินใจออกไปยอมจำนนต่อ
อาร์เจนตินา.

ไฮนซ์ เชฟเฟอร์


เรือดำน้ำ "U-977"
โดยตระหนักว่าเธอจะไม่ได้รับอนุญาตให้ข้ามมหาสมุทรแอตแลนติกเหนือบนพื้นผิว U-977 ในวันที่ 11 พฤษภาคม พ.ศ. 2488 จมลงนอกชายฝั่งนอร์เวย์และอยู่ภายใต้ RDP เป็นเวลา 66 วัน "โผล่ออกมา" แล้วทางใต้ของการสื่อสารหลักในมหาสมุทรแอตแลนติกเหนือของฝ่ายสัมพันธมิตร หลังจากนั้นอีก 31 วันในวันที่ 17 สิงหาคม เธอมาถึงท่าเรือแห่งหนึ่งของอาร์เจนตินา
แท้จริงแล้วจากโครงการเรือดำน้ำโครงการแรก นักออกแบบพยายามติดตั้งท่ออากาศซึ่งทำให้สามารถระบายอากาศในห้องด้วยอากาศในชั้นบรรยากาศได้ หากไม่ได้อยู่ในระดับความลึกปริทรรศน์ อย่างน้อยที่สุดก็อยู่ในตำแหน่งพื้นผิวในทะเลขรุขระ เห็นได้ชัดว่าการปรับตัวครั้งแรกโดยเฉพาะสำหรับการทำงานของเครื่องยนต์สันดาปภายในที่ระดับความลึกปริทรรศน์นั้นได้รับจากเรือดำน้ำในประเทศของจอมพลเคานต์เชอเรเมเตฟประเภท Kasatka
รูปแบบทั่วไปของ RDP และอุปกรณ์ของหัวท่อหายใจ:

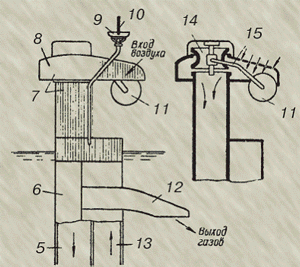
1 - วาล์วลอยอัตโนมัติ 2 - อากาศเป็นดีเซล 3 - ไอเสียจากเครื่องยนต์ดีเซล 4 - อากาศสำหรับการระบายอากาศ; 5 - เพลาอากาศ 6 - แฟริ่ง; 7 - การเคลือบป้องกันเรดาร์; 8 - หัวพร้อมวาล์ว; 9 - เสาอากาศรับสัญญาณสำหรับตรวจจับสถานีเรดาร์ปฏิบัติการ 10 - เสาอากาศของช่องสัญญาณเรดาร์ "ฉันเป็นของฉัน"; 11 - ลูกลอย; 12 — ที่บังของเพลาไอเสีย; 13 — เพลาไอเสีย; 14 - วาล์ว; 15 - คันโยก
ผู้เขียนและผู้ดำเนินการตามแนวคิดคือร้อยโทของคณะวิศวกรเครื่องกลของกองทัพเรือ พ.ศ. Salyar เขาไม่เพียงแต่พัฒนาอุปกรณ์เท่านั้น แต่ยังสร้างมันขึ้นมาในเวิร์กช็อปการขนส่งเซเนียด้วย ในปี 1910 ทำการทดสอบเปรียบเทียบเรือดำน้ำประเภทเดียวกันของจอมพล Count Sheremetev และ Skat และอุปกรณ์ของ Salyar ได้รับการประเมินในเชิงบวก นาวาตรี N. A. Gudim ผู้บัญชาการของ Skat ซึ่งต่อมาได้รับการแต่งตั้งให้ประจำการในทะเลบอลติกในฐานะผู้บัญชาการของหนึ่งในเรือดำน้ำดีเซลไฟฟ้าลำแรกของรัสเซีย Sharks ก็แนะนำให้ติดตั้งอุปกรณ์ Salyar ด้วย งานเสร็จสิ้น แต่พวกเขาไม่มีเวลาทำการทดสอบเนื่องจากการระบาดของสงครามโลกครั้งที่หนึ่งและในฤดูใบไม้ร่วงปี 2458 ฉลามไม่ได้กลับมาจากการรณรงค์ทางทหารครั้งที่ 17 ในปีเดียวกันเมื่อเรือดำน้ำแบบ Bars เริ่มเข้าประจำการ เรือดำน้ำ 2 ลำ ได้แก่ Volka และ Leopard ผู้บัญชาการ ร้อยโท Messer และ Trofimov บรรลุผลสำเร็จตามข้อเสนอของ Gudim บางส่วน บนเรือเหล่านี้ ท่อร่วมไอเสียของเครื่องยนต์ถูกยกขึ้นไปที่ระดับแท่นปริทรรศน์ และเพื่อจ่ายอากาศให้กับเครื่องยนต์ ท่อยืดได้ติดตั้งไว้ที่ส่วนโค้งของห้องโดยสาร เชื่อมต่อกับท่ออากาศของพัดลมจ่ายที่ปั๊ม อากาศเข้าไปในช่องดีเซลซึ่งเป็นหนึ่งในอะนาล็อกของ RDP รุ่นแรกของโลก อย่างไรก็ตาม เครื่องรับอากาศไม่ได้รับการปกป้องจากคลื่นที่ซัดเข้ามา นอกจากนี้ในระหว่างการทำงานของเครื่องยนต์ดีเซลมีการสังเกตการสั่นสะเทือนที่รุนแรงของปริทรรศน์แบบขยายซึ่งทำให้ไม่สามารถสังเกตเส้นขอบฟ้าได้
ในบางครั้ง ความคิดในการรับรองการทำงานของเครื่องยนต์ดีเซลที่ระดับความลึกของกล้องปริทรรศน์นั้นถูกลืมไปแล้ว มันไม่เกี่ยวข้องกัน อย่างไรก็ตามในช่วงกลางทศวรรษที่ 1930 ชาวดัตช์จำ RDP ได้ นาวาตรี Jan Wichersom ของกองทัพเรือเนเธอร์แลนด์ในปี พ.ศ. 2475 ได้เสนอให้ติดตั้งเครื่องเก็บทุ่นระเบิดใต้น้ำ O-19 และ O-20 ที่กำลังก่อสร้างด้วยอุปกรณ์นี้ นอกจากนี้เขายังพัฒนา RDP ที่ใช้การได้ ซึ่งเรียกว่า "sniver" ซึ่งแปลว่าการตะคอก การทดสอบในปี 1939 ประสบความสำเร็จ และเรือดำน้ำ O-21 ได้รับ RDP ก่อนสงครามโลกครั้งที่สอง ในปี 1940 ระหว่างการยึดครองของเนเธอร์แลนด์ เรือดำน้ำลำนี้ไม่ได้ตกอยู่ในมือของเยอรมัน แต่เยอรมันยึดเอกสารได้ บนพื้นฐานของ Dutch RDP นั้น "snorkel" ที่มีชื่อเสียงของเยอรมันถูกสร้างขึ้นในปี 1943
ประวัติการออกแบบ
ต้นแบบระยะไกลของโครงการ 613 คือโครงการ 608 ซึ่งการพัฒนา TsKB-18 เริ่มขึ้นในปี 2485 อย่างไรก็ตาม ในปี 1944 เรือดำน้ำเยอรมัน U-250 (ซีรีส์ VII) ได้รับการยกขึ้น ซึ่งมี TTD ใกล้กับเรือ pr.608 ในเรื่องนี้ผู้บังคับการกองทัพเรือ N.G. Kuznetsov ตัดสินใจหยุดทำงานในโครงการ 608 จนกว่าจะมีการศึกษา U-250
ในปี 1945 เรือเยอรมันเกือบทุกประเภทกลายเป็นรางวัลของกองทัพโซเวียต ทั้งตัวเรือเองและแบบร่างการทำงาน ผู้เชี่ยวชาญของโซเวียตได้มีโอกาสสังเกตความสำเร็จของเรือดำน้ำเยอรมันในเขตยึดครองของโซเวียต สิ่งที่น่าสนใจเป็นพิเศษคือเรือลำล่าสุดของซีรีส์ XXI ตามที่ผู้เชี่ยวชาญชาวอเมริกันกล่าวในเดือนพฤษภาคม พ.ศ. 2488 กองกำลังต่อต้านเรือดำน้ำของพันธมิตรไม่สามารถจัดการกับเรือเยอรมันในซีรีส์ XXI ได้อย่างมีประสิทธิภาพ เรือหลายลำในซีรีส์ XXI อยู่ในตำแหน่งของกองทัพเรือโซเวียตจนถึงต้นทศวรรษที่ 60 ความคุ้นเคยกับเรือลำนี้มีอิทธิพลอย่างมากต่อการออกแบบเรือดำน้ำโซเวียตขนาดกลางและขนาดใหญ่
ในช่วงต้นเดือนมกราคม พ.ศ. 2489 ผู้บัญชาการทหารสูงสุดได้อนุมัติ TTZ สำหรับเรือดำน้ำขนาดกลาง pr.613 จากการศึกษาเบื้องต้น จึงตัดสินใจเพิ่มความเร็ว ระยะการแล่น และการกระจัดของเรือ ในเดือนสิงหาคม พ.ศ. 2489 TsKB-18 ได้รับ TTZ ใหม่สำหรับการพัฒนาโครงการ 613 TsKB-18 ได้พัฒนาแบบร่างซึ่งได้รับการอนุมัติจากกฤษฎีกาของคณะรัฐมนตรีเมื่อวันที่ 20/10/1947
ในช่วงกลางปี พ.ศ. 2490 TsKB-18 ได้เริ่มพัฒนาโครงการทางเทคนิค 613 และเสร็จสิ้นในวันที่ 7 พฤศจิกายน พ.ศ. 2490 การออกแบบทางเทคนิคได้รับการอนุมัติโดย Resolution CM No. 3110-1258 ลงวันที่ 15 สิงหาคม 1948
ลำเรือ
กล่องที่แข็งแกร่งในพื้นที่ของช่องใส่แบตเตอรี่นั้นถูกสร้างขึ้นจากกระบอกสูบคู่สองอันซึ่งก่อตัวเป็น "รูปที่แปด" ในแนวตั้งซึ่งเส้นผ่านศูนย์กลางของกระบอกสูบด้านล่างนั้นใหญ่กว่าเส้นผ่านศูนย์กลางของกระบอกสูบด้านบน ในขณะเดียวกัน น้ำหนักสัมพัทธ์ของตัวเรือโดยรวมก็น้อยกว่าการออกแบบตัวเรือดำน้ำอื่นๆ ที่รู้จัก ตัวเรือถูกเชื่อมทั้งหมด สำหรับการผลิตตัวถัง มีการวางแผนที่จะใช้เหล็กกล้าอัลลอยด์ที่เชื่อมได้ของเกรด SHL-4 หรือ MS-1 ที่มีความแข็งแรงครากอย่างน้อย 40 kgf / cm2 เหล็กดังกล่าวถูกนำมาใช้สำหรับความต้องการในการต่อเรือดำน้ำเป็นครั้งแรก พวกเขาทำตามคำแนะนำของ TsKB-18 โดยองค์กรของกระทรวงโลหะผสมเหล็ก
ตัวเรือที่แข็งแกร่งของเรือดำน้ำแบ่งออกเป็นเจ็ดส่วนโดยสามช่อง - หัวเรือ, เสากลางและท้ายเรือ, เป็นช่องกำบังและถูกแยกออกจากช่องที่อยู่ติดกันโดยกำแพงกั้นทรงกลมที่แข็งแกร่งซึ่งออกแบบมาสำหรับ 10 kgf / cm2 จากด้านเว้า . ผนังกั้นแบบแบนกันน้ำที่เหลืออยู่ระหว่างช่องต่างๆ ได้รับการออกแบบมาสำหรับแรงดัน 1 กก./ตร.ซม.2
ถังอับเฉา 10 ถังถูกวางไว้ในตัวเรือดำน้ำขนาดเล็ก ความสามารถในการจมไม่ได้ของเรือดำน้ำในตำแหน่งผิวน้ำนั้นทำให้มั่นใจได้เมื่อส่วนใดส่วนหนึ่งของตัวถังแรงดันที่มีถังบัลลาสต์หลักสองถังที่อยู่ติดกันจากด้านหนึ่งถูกน้ำท่วมพร้อมเชื้อเพลิงเต็มถัง
การจ่ายเชื้อเพลิงอยู่ในถังสามถังภายในตัวถังแรงดัน (56 ตัน) และในถังสี่ถังที่อยู่ในห้องดับเบิลบอร์ด (59 ตัน) ในเวลาเดียวกันไม่เหมือนกับเรือดำน้ำยุคก่อนสงครามที่เชื้อเพลิงส่วนหนึ่งถูกนำเข้าสู่ถังเชื้อเพลิงและถังอับเฉาสำหรับการโหลดซ้ำ (การจ่ายเชื้อเพลิงที่เพิ่มขึ้น) บนเรือดำน้ำโครงการ 613 การจัดหาเชื้อเพลิงทั้งหมดจะรวมอยู่ในภาระปกติของเรือ .
โครงของตัวถังที่แข็งแกร่งทำจากกระเปาะแบบอสมมาตร โปรไฟล์นี้ออกแบบมาเป็นพิเศษสำหรับการต่อเรือใต้น้ำ - รูปร่างภาคตัดขวางของมันให้อัตราส่วนที่จำเป็นระหว่างพื้นที่หน้าตัดและโมเมนต์ความเฉื่อยสำหรับเงื่อนไขของโครงการ 613 และความหนาของผนังก็รวมกันได้ดีกับความหนา ของการชุบตัวถัง โครงการ 613 ถูกหล่อและจากนั้นพวกเขาก็เริ่มทำการเชื่อมแบบประทับตรา ในเวลาเดียวกันหลังคาที่มีการโค่นที่แข็งแกร่งซึ่งก่อนหน้านี้ทำเป็นแบบหล่อก็เริ่มทำด้วยหลังคาเชื่อมแบบประทับ ไม่เหมือนกับการออกแบบกำแพงกั้นทรงกลมของเรือดำน้ำยุคก่อนสงคราม วงแหวนสนับสนุนของกำแพงกั้นโครงการ 613 ไม่ได้ถูกตรึงเข้ากับตัวเรือแรงดัน แต่เชื่อมเข้าด้วยกัน รถถังที่ทนทานในการออกแบบไม่ได้แตกต่างอย่างมีนัยสำคัญจากโครงร่างที่ใช้กับเรือดำน้ำยุคก่อนสงคราม
สถาปัตยกรรมและการออกแบบของปลายเมื่อเทียบกับเรือดำน้ำก่อนสงครามในโครงการ 613 มีความแตกต่างอย่างมีนัยสำคัญ สำหรับปลายจมูก ความแตกต่างเหล่านี้เกี่ยวข้องกับการพัฒนาของเสียงอะคูสติก การเพิ่มจำนวนเครื่องมือที่ติดตั้งและการเพิ่มขนาดของเสาอากาศของระบบอะคูสติกแบบไฮโดรอะคูสติก ตลอดจนความต้องการการมองเห็นที่ดี นำไปสู่การพัฒนาคันชักตามความยาวของเรือและลักษณะของสเตนเลสแบบพิเศษ แฟริ่งเหล็ก ในเรือดำน้ำหลังสงครามลำแรก ในตอนแรกมีถังพยุงตัวอยู่ที่หัวเรือ ต่อจากนั้น เมื่อมีการถอดอาวุธยุทโธปกรณ์ปืนใหญ่ออก รถถังเหล่านี้ก็ถูกชำระบัญชี การเปลี่ยนแปลงในการออกแบบส่วนท้ายเรือนั้นสัมพันธ์กับการปรากฏตัวของตัวปรับแนวนอนบนเรือหลังสงครามและโดยเฉพาะอย่างยิ่งในโครงการ 613 ซึ่งเป็นส่วนหนึ่งของคอมเพล็กซ์ท้ายเรือใหม่
ในการเชื่อมต่อกับการใช้งานในการต่อเรือดำน้ำหลังสงครามของการออกแบบตัวเรือใหม่ เหล็กใหม่ที่มีคุณสมบัติเชิงกลที่ดีขึ้น และเทคโนโลยีใหม่สำหรับการผลิตตัวเรือโดยใช้การเชื่อมอัตโนมัติ ในทะเลดำในปี 2494-2495 ขนาดเต็มและขนาดใหญ่- ช่องสเกลได้รับการทดสอบสำหรับการระเบิดใต้น้ำของประจุไฟฟ้าใต้ทะเลและทุ่นระเบิดโครงการเรือดำน้ำจำนวนหนึ่งโดยมีตัวอย่างการเสริมแรงนอกเรือที่ทนต่อการระเบิดติดตั้งอยู่ รวมถึงช่องขนาดเต็ม "แปด" ของโครงการ 613 ซึ่งผลิตโดยโรงงานหมายเลข 444 ใน Nikolaev และช่องขนาดเต็มสองช่องของโครงการ 615 ตรวจสอบให้แน่ใจว่ามีการต้านทานการระเบิดที่ความลึกสูงสุดในการจุ่ม และวัสดุของตัวเครื่อง (เหล็กกล้า SHL-4) ไม่แสดงแนวโน้มที่จะเกิดการแตกหักแบบเปราะ
ผลการศึกษาเชิงทฤษฎีและการทดลองทั้งหมดเกี่ยวกับการต้านทานการระเบิดและการสั่นของเรือดำน้ำได้รับการตรวจสอบอีกครั้ง ยืนยันและแก้ไขบางส่วนตามข้อมูลการทดสอบเต็มรูปแบบของเรือดำน้ำ S-45 pr.613 ในปี 1958-1959 บนทะเลสาบ Ladoga .
โรงไฟฟ้า
โรงไฟฟ้าของเรือดำน้ำประกอบด้วย
เครื่องยนต์ดีเซลสองจังหวะ 37D ของโรงงาน Kolomna ขนาด 2,000 แรงม้าต่อเครื่อง แต่ละอันที่ 500 รอบต่อนาที หกสูบ ไร้คอมเพรสเซอร์ ทำงานเดี่ยวพร้อมวาล์วระบายโดยตรงจากโบลเวอร์โรตารีสองตัวที่ติดตั้งบนเครื่องยนต์ดีเซล
มอเตอร์ขับเคลื่อนหลักสองตัวของประเภท PG-101, สมอคู่, กำลัง 1,350 แรงม้า แต่ละตัว รอบละ 420 รอบต่อนาที แตกต่างจากการออกแบบที่มีอยู่ก่อนหน้านี้ พวกเขามีเตียงหมุนและระบายความร้อนด้วยน้ำ
มอเตอร์ไฟฟ้าสองตัวของหลักสูตรเศรษฐกิจของประเภท PG-103 แต่ละตัวมีกำลัง 50 แรงม้า แต่ละอันที่ 420 รอบต่อนาที สมอเดี่ยว ระบายอากาศได้เอง
แบตเตอรี่สำรองประกอบด้วยแบตเตอรี่ประเภท 46SU จำนวน 224 ก้อน โดยแบ่งออกเป็นสองกลุ่มๆ ละ 112 ก้อน
มอเตอร์ไฟฟ้าของหลักสูตรเศรษฐกิจส่งการหมุนไปยังเพลาใบพัดผ่านเกียร์ textrope ที่ยืดหยุ่นและเงียบด้วยอัตราทดเกียร์ 1: 3 และคลัตช์แรงเสียดทานของหลักสูตรเศรษฐกิจ ระหว่างเครื่องยนต์ดีเซลและมอเตอร์ใบพัดหลัก มีการติดตั้งการปลดการเชื่อมต่อข้อต่อลมยางของประเภท 4SHM (หนึ่งข้อต่อที่แต่ละด้านของผนังกั้น): มีการติดตั้งข้อต่อแบบเดียวกัน แต่ออกแบบมาสำหรับแรงบิดที่ต่ำกว่า ระหว่างมอเตอร์ใบพัดหลัก และเพลาขับดัน เพลาใบพัดเชื่อมต่อกับเพลาขับดันด้วยหน้าแปลนแข็ง ในจุดที่เพลาใบพัดออกจากตัวถังแรงดัน มีซีลท่อท้ายเรือที่ออกแบบใหม่พร้อมซีลคาร์บอน
เมื่อเปรียบเทียบกับเครื่องยนต์ 1D ที่ใช้ในเรือดำน้ำซีรีส์ IX-bis และ XIII-38 เครื่องยนต์ 37D ที่มีกำลังเท่ากันจะมีขนาด น้ำหนัก และจำนวนกระบอกสูบน้อยกว่า เนื่องจากเครื่องยนต์เป็นแบบสองจังหวะ จึงสันนิษฐานว่าการเป่าบัลลาสต์หลักด้วยเครื่องดีเซลนั้นทำได้ยากมาก ดังนั้นโครงการจึงจัดหาเครื่องเป่าลมแรงดันต่ำสำหรับเป่าถังอับเฉา ต่อมาเมื่อทำการทดสอบเครื่องยนต์ดีเซลใหม่บนแท่นวาง ความสามารถในการเอาชนะแรงดันย้อนกลับอย่างมีนัยสำคัญไปยังไอเสียได้รับการเปิดเผย จากนั้นจึงตัดสินใจไม่ติดตั้งเครื่องเป่าลม แต่จะเป่าบัลลาสต์หลักด้วยเครื่องยนต์ดีเซล
คุณสมบัติที่สำคัญมากของโรงไฟฟ้าโครงการ 613 ซึ่งเพิ่มคุณภาพทางยุทธวิธีของเรือโดยรวมอย่างมีนัยสำคัญคือการติดตั้งอุปกรณ์ RDP (การทำงานใต้น้ำของเครื่องยนต์ดีเซล) ซึ่งช่วยให้เครื่องยนต์ดีเซลทำงานใต้น้ำในตำแหน่งปริทรรศน์ . ในเวลาเดียวกัน อากาศบริสุทธิ์ที่จำเป็นสำหรับการทำงานของเครื่องยนต์ดีเซลจะเข้าสู่เรือผ่านเพลาพิเศษพร้อมวาล์วลอยซึ่งปิดช่องไอดีของเพลาเมื่อมีคลื่นปกคลุม และก๊าซไอเสียจะถูกส่งลงเรือผ่าน เพลาไอเสียพิเศษส่วนบนซึ่งความลึกของปริทรรศน์แช่อยู่ในน้ำที่มีความลึกประมาณ 0.5-0.75 ม. เพลาทั้งสองมีจำนวนล็อคที่ต้องการพร้อมรีโมทคอนโทรล เช่นเดียวกับการทำงานของเครื่องยนต์ดีเซลในตำแหน่งพื้นผิว ในโหมด RDP อากาศจะเข้าสู่เรือด้วยแรงโน้มถ่วงเนื่องจากความหายากที่เกิดจากเครื่องยนต์ดีเซลที่ใช้งาน ในขณะที่มีสุญญากาศขนาดใหญ่ในห้องดีเซล กำลังของเครื่องยนต์จะลดลง และ ดังนั้นความเร็วของเรือ การแยกสารบริสุทธิ์สูงสุดที่อนุญาตเมื่อเครื่องยนต์ดีเซลทำงานในโหมด RDP นั้นถูกจำกัดโดยสภาวะความมีชีวิตในห้องดีเซล
อุปกรณ์ RDP ทำให้สามารถดำเนินการตามเส้นทางยาวของเรือดำน้ำในตำแหน่งปริทรรศน์โดยไม่ต้องโผล่ขึ้นมาบนผิวน้ำ ต้องขอบคุณอุปกรณ์ RDP ทำให้สามารถชาร์จแบตเตอรี่ได้ในขณะที่เรือดำน้ำเคลื่อนที่ในระดับความลึกปริทรรศน์ ซึ่งช่วยปรับปรุงการล่องหนได้อย่างมาก ในกรณีเดียวเท่านั้นจำเป็นต้อง จำกัด หรือแม้กระทั่งละทิ้งอุปกรณ์ RDP โดยสิ้นเชิง - ด้วยการผสมผสานของเส้นทางและทิศทางลมของเรือที่ไม่เอื้ออำนวยซึ่งก๊าซไอเสียถูกดูดผ่านเพลาไอดีเข้าสู่เรือดังนั้นจึงเป็นไปไม่ได้ เพื่อรักษาความน่าอยู่ของเรือให้อยู่ในระดับที่เหมาะสม
เป็นครั้งแรกที่อุปกรณ์ RDP ปรากฏในปี 2486-2487 บนเรือดำน้ำเยอรมัน ("Schnorchel") อุปกรณ์ RDP บนเรือดำน้ำในประเทศเมื่อเทียบกับ Snorkel ได้รับการปรับปรุงอย่างมีนัยสำคัญในการออกแบบ เพื่อปรับปรุงความสามารถในการอยู่อาศัยเมื่อใช้ RDP เพลาดูดอากาศบริสุทธิ์และไอเสียถูกเว้นระยะห่างตามความยาวของเรือจนถึงระยะสูงสุดที่เป็นไปได้ อุปกรณ์ RDP เช่นเดียวกับรูขนาดใหญ่อื่นๆ บนเรือดำน้ำ ต้องมีการตรวจสอบสภาพและการใช้งานอย่างเข้มงวดทุกวัน การละเมิดข้อกำหนดนี้นำไปสู่อุบัติเหตุร้ายแรงและแม้กระทั่งภัยพิบัติ
แผงควบคุมของมอเตอร์ขับเคลื่อนหลักได้รับการออกแบบใหม่โดยพื้นฐานพร้อมคอนแทคเชิงกล เมื่อเทียบกับแผงสวิตช์มีดที่มีอยู่ก่อนหน้านี้ สวิตช์บอร์ดเหล่านี้แตกต่างจากสวิตช์บอร์ดที่ใช้งานง่ายและความน่าเชื่อถือในการใช้งาน แผงควบคุมของมอเตอร์ไฟฟ้าหลักและมอเตอร์ไฟฟ้าของหลักสูตรเศรษฐกิจถูกคิดค่าเสื่อมราคา
ข้อต่อเพลานิวเมติกของยางประเภท 4MSh มีข้อได้เปรียบที่สำคัญเหนือข้อต่อประเภท Bamag ที่ติดตั้งบนเรือดำน้ำของโครงการก่อนสงคราม - ทำให้สามารถกันเสียงเครื่องยนต์ดีเซลและสายเพลาได้เช่นเดียวกับการติดตั้งสายเพลา บนสลิปเวย์ และไม่ใช่หลังจากปล่อยลงน้ำแล้ว เนื่องจากพวกมันยอมให้มีการแตกหักและการเคลื่อนตัวของแกนผสมพันธุ์ในแต่ละส่วนของเพลามากขึ้นอย่างมีนัยสำคัญ นอกจากนี้ยังลดความเค้นในแนวเพลาจากการสั่นสะเทือนของแรงบิด และอำนวยความสะดวกในการเปลี่ยนโซนเรโซแนนซ์ด้วยความเร็วที่เหมาะสม ต่อจากนั้น หลังจากการทดสอบบนเรือนำ เพื่อแยกโซนที่เหลือของการสั่นสะเทือนแบบบิด ได้มีการติดตั้งเครื่องป้องกันการสั่นสะเทือนแบบลูกตุ้มที่ออกแบบโดยโรงงาน Kolomna ซึ่งพัฒนาขึ้นตามโครงการที่เสนอโดยผู้เชี่ยวชาญของสถาบันวิจัยกลาง นักวิชาการ A.N. Krylov - V.P. Terskikh และ I.A. Lurie
ระบบและอุปกรณ์เรือทั่วไป
คุณสมบัติหลักของระบบการดำน้ำและขึ้นในโครงการคือการไม่มี Kingstones ของถังอับเฉาหลัก การติดตั้ง Kingstones นั้นมองเห็นได้เฉพาะในถังอับเฉาของกลุ่มกลาง (หมายเลข 4 และหมายเลข 5) การไม่มีคิงสโตนทำให้การออกแบบระบบง่ายขึ้นอย่างมาก อำนวยความสะดวกในการบำรุงรักษา และลดค่าใช้จ่ายในการสร้างเรือ วาล์วระบายอากาศถูกติดตั้งโดยตรงบนวาล์วของถังอับเฉาซึ่งทำให้สามารถกำจัดท่อระบายอากาศได้ โซลูชันนี้ทำให้สามารถลดมวลของระบบลงได้อย่างมาก เพิ่มความสามารถในการอยู่รอด และไม่ทำให้โครงสร้างด้านบนรกรุงรัง
อากาศอัดสำหรับเป่าถังบัลลาสต์หลักถูกวางไว้ใน 22 กระบอกสูบที่มีปริมาตรรวมประมาณ 9,000 ลิตรที่ความดัน 200 kgf / cm2 เพื่อเติมอากาศอัด นอกเหนือจากคอมเพรสเซอร์ไฟฟ้า เป็นครั้งแรกในการปฏิบัติงานในประเทศ คอมเพรสเซอร์ดีเซล DK-2 สองตัวที่มีความจุอากาศอัด 9 ลิตรต่อนาทีแต่ละตัวได้รับการติดตั้ง เค้าโครงของระบบท่ออากาศแรงดันสูงได้รับการพัฒนาตามเงื่อนไขเพื่อลดเวลาในการเป่าถังอับเฉาฉุกเฉินให้ได้มากที่สุด สำหรับสิ่งนี้ บัลลาสต์หลักไม่ได้เป่าด้วยอากาศที่ถูกควบคุมด้วยแรงดัน 30 atm เช่นเดียวกับในกรณีของเรือดำน้ำยุคก่อนสงคราม แต่ด้วยอากาศแรงดันสูง - 200 atm พร้อมกันนี้ได้เพิ่มส่วนของสายหลักและท่อสำหรับเป่าถังอับเฉา
ในการเชื่อมต่อกับการเพิ่มความลึกในการแช่สูงสุดถึง 200 เมตร ปั๊มระบายน้ำหลักและปั๊มลูกสูบท้องเรือได้รับการติดตั้งของแบรนด์ใหม่ ปั๊มระบายน้ำหลัก 6MVx2 มีกำลัง 180 ลบ.ม./ชม. ที่หัวเสาน้ำ 20 ม. และ 22 ลบ.ม./ชม. ที่ความสูง 125 ลบ.ม./ชม.
เครื่องสูบน้ำแบบลูกสูบ TP-20/250 มีกำลังการสูบน้ำ 20 ลบ.ม./ชม. โดยมีหัวสูบน้ำลึก 250 ม.
โครงการจัดเตรียมระบบไฮดรอลิกของเรือที่ออกแบบมาเพื่อสั่งงานหางเสือแนวตั้งและแนวนอน ตัวยกเพลา RDP กล้องปริทรรศน์ และอุปกรณ์ยืดหดได้อื่นๆ ตลอดจนเปิดและปิดฝาด้านหน้าของท่อตอร์ปิโด คิงส์ตัน และวาล์วสำหรับระบายอากาศของถังของเรือ ระบบดำน้ำ, ล็อคภายนอกสำหรับช่องระบายก๊าซดีเซล, อุปกรณ์ RDP, เพลาระบายอากาศของเรือทั่วไป และการจ่ายอากาศไปยังเครื่องยนต์ดีเซล สื่อการทำงานของระบบไฮดรอลิกคือน้ำมันสปินเดิล ระบบไฮดรอลิกมีไว้สำหรับเครื่องสูบน้ำที่เหมือนกันสองเครื่อง โดยเครื่องหนึ่งเป็นเครื่องสำรอง การติดตั้งทั้งสองตั้งอยู่ในที่เดียว - ในเสากลาง ปั๊มของระบบไฮดรอลิก NVV-1.4 เป็นแบบสกรูและมีความจุ 21 ลิตร / นาทีที่แรงดัน 100 atm ชุดสูบน้ำประกอบด้วยตัวสะสมนิวโม-ไฮดรอลิค ปั๊มและแอคคูมูเลเตอร์ถูกรวมไว้ในระบบ เพื่อให้สามารถเชื่อมต่อแอคคูมูเลเตอร์กับปั๊มใดก็ได้ หรือทั้งสองแอคคูมูเลเตอร์พร้อมกัน ปั๊มจ่ายน้ำมันแรงดันให้กับหม้อสะสมและผู้บริโภค เมื่อชาร์จแบตเตอรี่เต็มและไม่มีการใช้น้ำมัน ปั๊มจะเปลี่ยนให้ทำงานโดยอัตโนมัติ "บนตัวมันเอง" (ปั๊มถัง) ในขณะที่ใช้พลังงานเพียงเล็กน้อย
ในขั้นต้นระบบของตัวปรับความลึกที่ไม่มีจังหวะ Sprut และตัวปรับความลึกขณะเคลื่อนที่ของประเภท Skat-1 นั้นถูกมองเห็น แต่เนื่องจากประสิทธิภาพที่ไม่น่าพอใจจึงไม่ได้ติดตั้งในภายหลัง
ลิฟท์ปริทรรศน์เป็นแบบไฮดรอลิก ในเวลาเดียวกัน ในตอนแรกมีการคาดการณ์ไว้ว่าจะยกกล้องปริทรรศน์ขึ้นโดยใช้ระบบไฮดรอลิกส์เท่านั้น และการลดลงนั้นเกิดขึ้นภายใต้อิทธิพลของน้ำหนักกล้องปริทรรศน์เอง ต่อจากนั้น ลิฟต์ไฮดรอลิกได้รับการออกแบบใหม่ในลักษณะที่บังคับลดระดับปริทรรศน์ลงด้วย
คุณสมบัติที่โดดเด่นของเรือดำน้ำ pr.613 (รวมถึงโครงการหลังสงครามทั้งหมด) คือการใช้กลไกการเสื่อมราคาอย่างกว้างขวางเพื่อเพิ่มความสามารถในการอยู่รอดในระหว่างการสั่นของลำตัวเรือที่เกิดจากการระเบิดของประจุลึก เช่นเดียวกับ ลดการส่งลงน้ำผ่านตัวเรือจากเสียงของกลไกการทำงานใต้น้ำ ซึ่งเพิ่มการล่องหนของเรืออย่างมาก สำหรับเรือดำน้ำแบบอนุกรมในประเทศทุกลำ เครื่องยนต์ดีเซลหลักและมอเตอร์ใบพัดเริ่มติดตั้งบนโช้คอัพ
การสร้างเรือ pr.613
ในปี 1948 โรงงานหมายเลข 444 ใน Nikolaev และ Krasnoye Sormovo ใน Gorky เริ่มเตรียมการสำหรับการสร้างเรือดำน้ำชุดใหญ่ของโครงการ 613 สถานการณ์นี้จำเป็นต้องมีองค์กรของกลุ่มนักออกแบบพิเศษ TsKB-18 ในปี 1948 เพื่อให้ความช่วยเหลือด้านเทคนิคแก่ พืชเหล่านี้ ที่โรงงานหมายเลข 444 กลุ่มความช่วยเหลือทางเทคนิคนำโดย Ya.E. Evgrafov หัวหน้าผู้ออกแบบโครงการ ที่โรงงาน Krasnoye Sormovo กลุ่มความช่วยเหลือทางเทคนิคนำโดยรองหัวหน้านักออกแบบ V.S. Dorofeev
เมื่อวันที่ 11 เมษายน พ.ศ. 2493 ที่โรงงานหมายเลข 444 ใน Nikolaev การวางเรือดำน้ำนำ S-61 โรงงานหมายเลข 376 เกิดขึ้น (ในระหว่างการก่อสร้างส่วนการไหลการวางเรือถือเป็นการติดตั้ง ส่วนแรกบนสลิปเวย์) และในวันที่ 26 มิถุนายนของปีเดียวกัน การทดสอบไฮดรอลิกของเคสแข็งแรง เมื่อวันที่ 22 กรกฎาคม พ.ศ. 2493 เรือดำน้ำหลักได้เปิดตัวโดยมีความพร้อมทางเทคนิคประมาณ 70%
ในกระบวนการสร้างเรือให้เสร็จเกิดอุบัติเหตุครั้งใหญ่ - เมื่อวันที่ 6 พฤศจิกายน พ.ศ. 2493 เมื่อออกจากท่าเรือเรือล่มในขณะที่ช่อง 2, 6 และ 7 ถูกน้ำท่วมบางส่วน สาเหตุของอุบัติเหตุคือการไม่ปฏิบัติตามคำแนะนำในการเทียบท่าและถอดเรือ ปรากฎว่าก่อนที่จะถอนออกจากท่าไม่มีน้ำเข้าไปในถังเชื้อเพลิงซึ่งทำให้เรือสูญเสียเสถียรภาพ นอกจากนี้ ช่องทางเข้าทั้งหมดไม่ได้ถูกทุบให้แน่นก่อนที่จะออกจากท่าเรือ เนื่องจากอุบัติเหตุครั้งนี้ การก่อสร้างเรือจึงล่าช้า การทดลองจอดเรือเริ่มขึ้นในวันที่ 12 มกราคม พ.ศ. 2494 เท่านั้น
ในวันที่ 5 พฤษภาคม พ.ศ. 2494 เรือได้เคลื่อนไปยังฐานการจัดส่งของโรงงานหมายเลข 444 ในเซวาสโทพอลเพื่อทดสอบโรงงานและรัฐ ในวันที่ 14 กรกฎาคม มีการดำน้ำใต้ทะเลลึก และในวันที่ 15 ตุลาคม หลังจากเสร็จสิ้นการทดลองทางทะเลในโรงงานทั้งหมด เรือลำนี้ได้ถูกนำเสนอต่อคณะกรรมาธิการว่าด้วยการยอมรับเรือของกองทัพเรือ การทดสอบสถานะของเรือดำน้ำเริ่มขึ้นเมื่อวันที่ 17 ตุลาคม พ.ศ. 2494 และในวันที่ 24 พฤษภาคม พ.ศ. 2495 หลังจากการทดสอบเสร็จสิ้นความคิดเห็นทั้งหมดจะถูกตัดออกและดำเนินการออกจากการควบคุมใบรับรองการยอมรับลงนามโดยคณะกรรมการการยอมรับของรัฐ
ที่โรงงาน Krasnoye Sormovo การวางเรือดำน้ำ S-80 หมายเลขประจำเครื่อง 801 ซึ่งเป็นเรือนำของโครงการ 613 สำหรับโรงงานแห่งนี้เกิดขึ้นเมื่อวันที่ 13 มีนาคม พ.ศ. 2493 เรือลำนี้เปิดตัวเมื่อวันที่ 21 ตุลาคมของปีเดียวกันโดยมีความพร้อมประมาณ 70% และในวันที่ 1 พฤศจิกายน การถ่ายโอนไปยังฐานการว่าจ้างในบากูเพื่อให้เสร็จสิ้นและการทดสอบเสร็จสมบูรณ์ การทดลองจอดเรือดำเนินการตั้งแต่วันที่ 31 ธันวาคม พ.ศ. 2493 ถึง 26 เมษายน พ.ศ. 2494 ตั้งแต่วันที่ 27 เมษายนถึง 28 มิถุนายนของปีเดียวกัน มีการดำเนินการทดลองในทะเลของโรงงาน เมื่อวันที่ 9 มิถุนายน มีการดำน้ำลึก
หลังจากเสร็จสิ้นการทดสอบของรัฐและกำจัดข้อบกพร่องที่ระบุทั้งหมดแล้วในวันที่ 2 ธันวาคม พ.ศ. 2494 มีการลงนามในใบรับรองการยอมรับ
ในกระบวนการทดสอบและส่งมอบเรือนำของโครงการ 613 มีการเปิดเผยข้อบกพร่องในการออกแบบจำนวนหนึ่ง ซึ่งข้อบกพร่องที่ใหญ่ที่สุดมีดังต่อไปนี้
1. ในแง่ของระบบไฮดรอลิก - การไหลเข้าของน้ำทะเลเข้าไปในน้ำมัน, การกระแทกของไฮดรอลิกในท่อ, การปิดผนึกข้อต่อไม่ดี, การทำความสะอาดน้ำมันจากสารปนเปื้อนไม่ดี, การทำงานที่ไม่น่าเชื่อถือของเครื่องจักรไฮดรอลิกของวาล์วระบายอากาศในตำแหน่งที่จมอยู่ใต้น้ำ, ความไม่สอดคล้องกันของที่เลือก วัสดุที่มีสภาพการทำงานของแอคชูเอเตอร์บางตัวของระบบไฮดรอลิก ฯลฯ ;
2. สำหรับอุปกรณ์แบบยืดหดได้ - การไม่มีตัวกั้นในอุปกรณ์จำนวนหนึ่งที่ป้องกันอุปกรณ์แบบยืดหดได้จากการพลิกกลับ และในกรณีที่ตัวกั้นถูกจัดเตรียมไว้ พวกมันได้รับการแก้ไขอย่างไม่ถูกต้อง โดยไม่คำนึงถึงแรงกดของเคสแข็งแรงในตำแหน่งที่จมอยู่ใต้น้ำ
3. ตามแนวของเพลา - อุณหภูมิที่เพิ่มขึ้นของแบริ่งของข้อต่อขับจังหวะเศรษฐกิจและการยึดแผ่นแรงเสียดทานไม่สำเร็จ การปรากฏตัวของโซนต้องห้ามของการสั่นสะเทือนบิดซึ่งจำเป็นต้องติดตั้งเครื่องป้องกันการสั่นสะเทือนพิเศษ ความล้มเหลวของกระบอกสูบของข้อต่อลมยางและความยากในการทำงานที่เกี่ยวข้องกับการเปลี่ยน เพื่อกำจัดข้อบกพร่องเหล่านี้ การออกแบบข้อต่อจึงต้องทำใหม่
ข้อบกพร่องเหล่านี้และข้อบกพร่องด้านการออกแบบอื่น ๆ จะต้องถูกกำจัดในระหว่างการทดสอบเรือดำน้ำส่วนหัว
ต่อมามีการเปิดเผยข้อบกพร่องที่สำคัญในการออกแบบเครื่องยนต์หลัก 37D ซึ่งนำไปสู่อุบัติเหตุร้ายแรง สิ่งนี้เกิดขึ้นในปี 1954 ระหว่างการทดสอบการยอมรับในทะเลแคสเปียนบนเรือดำน้ำอนุกรม pr.613 ลำหนึ่ง เรืออยู่ในโหมด RDP ภายใต้เครื่องยนต์ดีเซลสองตัว จากเสากลาง มีคำสั่งไปยังช่องที่ห้า: "ระบอบการปกครองสิ้นสุดลงแล้ว หยุดดีเซล หัวหน้ากลุ่มผู้ควบคุมวางมู่เล่ควบคุมดีเซลในตำแหน่ง "หยุด" และโดยไม่ต้องรอให้เครื่องยนต์ดีเซลเริ่มทำงานช้าลงให้ปิดแผ่นปิดช่องจ่ายแก๊สด้วยตัวควบคุมไฮดรอลิก มีเสียงระเบิดดังขึ้น เมื่อตรวจสอบสาเหตุของการระเบิดปรากฎว่าในระหว่างการทำงานระยะสั้นของเครื่องยนต์ดีเซลซึ่งดำเนินต่อไปหลังจากการปิดเต้าเสียบแก๊สส่วนผสมที่ระเบิดได้ก่อตัวขึ้นในเครื่องรับและเต้าเสียบแก๊สและประกายไฟแรกที่ตกลงมา จากน้ำมันดีเซลเข้าเครื่องรับทำให้เกิดการระเบิด
การระเบิดทำลายผนังเรียบของเครื่องรับและเปลวไฟขนาดใหญ่เล็ดลอดผ่านช่องที่เกิดขึ้นเข้าไปในช่อง ชิ้นส่วนของกำแพงที่ถูกทำลายของเครื่องรับได้สังหารหัวหน้าแผนกควบคุมคุณภาพของโรงงาน Krasnoye Sormovo ซึ่งอยู่ระหว่างเครื่องยนต์ดีเซล ชิ้นส่วนเดียวกันทำลายผนังของเครื่องรับของเครื่องยนต์ที่สอง หลายคนที่อยู่ในช่องดีเซลได้รับการเผาไหม้อย่างรุนแรง ดีเซลทั้งสองต้องเปลี่ยนใหม่ คณะกรรมการที่ได้รับการแต่งตั้งเป็นพิเศษพบว่าสาเหตุหลักของอุบัติเหตุคือการกระทำที่ไม่ถูกต้องของหัวหน้าคนงานเมื่อหยุดเครื่องยนต์ดีเซล ในเวลาเดียวกันคณะกรรมการแนะนำให้ติดตั้งอินเตอร์ล็อคเพื่อความปลอดภัยในเครื่องยนต์ดีเซลเพื่อป้องกันการระเบิดในตัวรับเมื่อเครื่องยนต์ดีเซลหยุดทำงานรวมทั้งแนะนำคำแนะนำที่ชัดเจนในคำแนะนำ - เมื่อหยุดเครื่องยนต์ดีเซลให้ปิดฝาหลังเท่านั้น เครื่องยนต์ดีเซลลดความเร็วลงเหลือ 300 ต่อนาที
หลังจากดำเนินกิจกรรมที่วางแผนไว้ทั้งหมดบนเรือดำน้ำแล้วอุบัติเหตุดังกล่าวก็ไม่เกิดขึ้นอีก สำหรับช่วงเวลาของการสอบสวนสาเหตุของอุบัติเหตุและการดำเนินการตามมาตรการตามคำแนะนำของคณะกรรมาธิการ เรือดำน้ำถูกห้ามไม่ให้แล่นในโหมด RDP เป็นการชั่วคราว .
คณะกรรมการการยอมรับของรัฐให้คะแนนสูงแก่เรือดำน้ำนำ pr.613 ใบรับรองการยอมรับของเรือดำน้ำ S-80 ระบุว่า:
“เรือดำน้ำ S-80 เป็นเรือที่มีความสามารถในการเดินเรือที่ดี พัฒนาองค์ประกอบใต้น้ำทั้งในด้านความลึกของการดำน้ำ ความเร็ว และระยะการเดินทางใต้น้ำ ควบคุมได้ง่ายในตำแหน่งใต้น้ำในทุกความเร็ว สามารถดำน้ำและเคลื่อนตัวบนผิวน้ำได้อย่างรวดเร็ว และมี ปริมาณสำรองที่จำเป็นสำหรับการอยู่ในทะเลอย่างต่อเนื่องในช่วงเวลาที่กำหนดโดยข้อกำหนด เรือดำน้ำ S-80 เป็นเรือที่ทันสมัยอย่างสมบูรณ์ที่สามารถปฏิบัติภารกิจการรบในโรงละครแห่งสงครามทางทะเล
ในปี พ.ศ. 2496 อู่ต่อเรืออื่น ๆ อีกหลายแห่งได้เชื่อมต่อกับการสร้างเรือดำน้ำ pr.613
พร้อมกันกับการโอนวัสดุโครงการ 613 ทั้งหมด พนักงานจำนวนหนึ่งของ TsKB-18 ถูกโอนไปยัง SKB-112 รวมถึงหัวหน้าผู้ออกแบบโครงการ Z.A. Deribin ซึ่งได้รับการแต่งตั้งให้เป็นหัวหน้า SKB-112 รองหัวหน้าผู้ออกแบบโครงการพร้อมกัน 613 A.P. Solovyov หัวหน้ากลุ่ม N.M. Vavilov และคนอื่น ๆ
ในปี 1954 โดยการตัดสินใจของรัฐบาลสหภาพโซเวียต ภาพวาดการทำงานและเอกสารทางเทคนิคของเรือดำน้ำ pr.613 ถูกโอนไปยังสาธารณรัฐประชาชนจีนเพื่อสร้างเรือในประเทศจีน ภายใต้เงื่อนไขของข้อตกลงกับ PRC เรือสามลำแรกจะต้องผลิตในสหภาพโซเวียตทั้งหมด จากนั้นจึงขนส่งในรูปแบบแยกชิ้นส่วนไปยัง PRC เพื่อประกอบและใช้งานอีกครั้งดังที่เคยทำเมื่อ สร้างเรือสำหรับตะวันออกไกล
เรือลำต่อมาจะถูกสร้างขึ้นใน PRC โดยสหภาพโซเวียตเป็นผู้จัดหาเหล็กสำหรับตัวถัง กลไก อุปกรณ์ไฟฟ้า เครื่องมือและอาวุธ เพื่อให้ความช่วยเหลือด้านเทคนิคในการสร้างและพัฒนาเรือดำน้ำเหล่านี้ กลุ่มผู้เชี่ยวชาญถูกส่งไปยังประเทศจีนจาก TsKB-18, TsKB-112 และจากโรงงาน Krasnoye Sormovo รวมประมาณ 20 คน
ในสาธารณรัฐประชาชนจีน ผู้เชี่ยวชาญชาวจีนที่มีส่วนร่วมของผู้เชี่ยวชาญโซเวียตได้แปลเอกสารการออกแบบและเทคโนโลยีทั้งหมดเป็นภาษาจีน
ในเวลาเดียวกัน ผู้เชี่ยวชาญของโซเวียตได้ฝึกฝนผู้เชี่ยวชาญของจีนเกี่ยวกับทฤษฎีเรือดำน้ำและทำความคุ้นเคยกับคุณสมบัติของเรือดำน้ำ Project 613 ซึ่งเป็นเทคโนโลยีในการสร้างและทดสอบ
เรือดำน้ำสามลำแรกถูกสร้างขึ้นที่อู่ต่อเรือ Shanghai Jinan และเรือได้รับการทดสอบใน Port Arthur
ในตอนท้ายของปี 1957 หลังจากเสร็จสิ้นการทดสอบเรือดำน้ำสามลำแรก ผู้เชี่ยวชาญโซเวียตส่วนหนึ่งกลับไปยังสหภาพโซเวียต ในเวลานี้ การเตรียมการสำหรับการสร้างเรือดำน้ำ pr.613 ที่อู่ต่อเรือ Wuchang ใน Hankou ได้เริ่มขึ้นใน PRC
เรือดำน้ำนำของโรงงาน Uchansky ถูกส่งไปทดสอบที่ Port Arthur ในเดือนพฤศจิกายน พ.ศ. 2501 และเสร็จสิ้นการทดสอบในเดือนมกราคม พ.ศ. 2502 มาถึงตอนนี้ เรือดำน้ำประมาณ 15 ลำที่สร้างโดยโรงงานจี่หนานอยู่ในพอร์ตอาร์เธอร์แล้ว
เรือดำน้ำดีเซลไฟฟ้าลำแรกหลังสงครามคือ DPL pr.613 ที่ใหญ่ที่สุดในกองทัพเรือสหภาพโซเวียต (ตามการจัดประเภท "วิสกี้" ของ NATO) โครงการนี้เป็นการพัฒนาโครงการเรือดำน้ำขนาดกลาง 608 ซึ่งพัฒนาขึ้นในปี พ.ศ. 2485-2487 ในปลายปี พ.ศ. 2487 กองทัพเรือได้รับวัสดุจากเรือดำน้ำเยอรมัน U-250 (จมลงในอ่าวฟินแลนด์แล้วยกขึ้น) ซึ่งมี TFC ใกล้เคียงกับโครงการ 608 ในการนี้ พลเรือเอก N.G. Kuznetsov ผู้บังคับการกองทัพเรือ ตัดสินใจหยุด ก่อนศึกษาเนื้อหาเกี่ยวกับ U-250 ให้ทำงานในโครงการ 608 ในเดือนมกราคม พ.ศ. 2489 หลังจากศึกษาเรือดำน้ำที่ยึดได้ (ชุด U-250, XXI เป็นต้น) ผู้บัญชาการกองทัพเรือตามข้อเสนอของ GUK ได้อนุมัติ TTZ สำหรับการออกแบบโครงการเรือดำน้ำ 613 มีการเสนอให้เปลี่ยนลักษณะการทำงานของโครงการ 608 ในทิศทางของการเพิ่มความเร็วและระยะการล่องเรือโดยเพิ่มการกระจัดมาตรฐานเป็น 800 ตัน การออกแบบได้รับความไว้วางใจจาก TsKB-18 (ปัจจุบันคือ TsKB MT "Rubin") และ V.N. Peregudov ได้รับการแต่งตั้งให้เป็นหัวหน้านักออกแบบ จากนั้น Y.E. Evgrafov และตั้งแต่ปี 1950 Z.A. Deribin กัปตันอันดับ 2 L.I. Klimov ได้รับการแต่งตั้งให้เป็นผู้สังเกตการณ์หลักจากกองทัพเรือ ในเดือนสิงหาคม พ.ศ. 2489 มีการออก TTZ สำหรับโครงการ 613 และในวันที่ 15/08/1948 การออกแบบทางเทคนิคได้รับการอนุมัติจากรัฐบาลโซเวียต เมื่อพัฒนาภาพวาดเชิงทฤษฎี เราให้ความสนใจเป็นพิเศษเพื่อให้มั่นใจว่ามีสมรรถนะการขับขี่สูงในตำแหน่งที่จมอยู่ใต้น้ำ เป็นผลให้ความเร็วใต้น้ำทั้งหมดเพิ่มขึ้นเป็น 13 นอต (แทนที่จะเป็น 12) อาวุธยุทโธปกรณ์ประกอบด้วยคันธนู 533 มม. TT สี่คัน และท้ายเรือ 533 มม. TT สองคัน จำนวนตอร์ปิโดสำรองสำหรับตอร์ปิโดธนูเพิ่มขึ้นเป็น 6 ซึ่งเป็นจำนวนตอร์ปิโดสำรองทั้งหมด วิธีการหลักในการตรวจจับในตำแหน่งที่จมอยู่ใต้น้ำคือโซนาร์ Tamir-5L และโซนาร์ค้นหาทิศทางเสียงรบกวนของ Phoenix ในขั้นต้น ปืนใหญ่ถูกติดตั้งจากปืนกล SM-24-ZIF แฝด 57 มม. หนึ่งกระบอกและปืนกล 25 มม. แฝดหนึ่งกระบอก 2M-8 ต่อมา ปืนใหญ่ทั้งหมดจาก DPL pr.613 ทั้งหมดถูกลบออก โดยการออกแบบ มันเป็นเรือดำน้ำสองลำ ตัวถังที่แข็งแรงนั้นเชื่อมทั้งหมดโดยมีโครงภายนอกแบ่งออกเป็น 7 ช่องในพื้นที่ของแบตเตอรี่นั้นถูกสร้างขึ้นจากกระบอกสูบจับคู่สองอันที่ก่อตัวเป็น "รูปที่แปด" โดยเส้นผ่านศูนย์กลางของกระบอกสูบด้านล่างจะใหญ่กว่า เส้นผ่านศูนย์กลางของส่วนบน ช่องที่ 1, 3 และ 7 เป็นผนังกั้นทรงกลมที่แยกจากกันซึ่งออกแบบมาสำหรับแรงดัน 10 กก./ซม.2 และก่อตัวเป็นช่องกำบัง ส่วนกั้นที่เหลือได้รับการออกแบบสำหรับแรงดัน 1 กก./ซม.2 รับประกันความจมไม่ได้เมื่อช่องหนึ่งช่องและ CGB สองช่องที่อยู่ติดกันด้านหนึ่งถูกน้ำท่วม บัลลาสต์ได้รับใน 10 TsGB วางไว้ในตัวเครื่องที่เบา TsGB ไม่มีคิงสโตน (เฉพาะในกลุ่มกลาง รถถังหมายเลข 4 และหมายเลข 5 มีคิงสโตน) ซึ่งทำให้การออกแบบง่ายขึ้นและลดต้นทุนการก่อสร้าง อากาศแรงดันสูงถูกบรรจุในถัง 22 ถังที่มีปริมาตรประมาณ 900 ลิตร ออกแบบมาสำหรับแรงดัน 200 กก./ซม.2 อากาศถูกเติมโดยคอมเพรสเซอร์ดีเซล 2 ตัว ในขั้นต้น ท่ออากาศเป็นเหล็กที่บุด้วยทองแดงภายใน แต่ท่อเหล่านี้สึกกร่อนอย่างหนักและต่อมาถูกแทนที่ด้วยทองแดงแดง ปั๊มระบายน้ำหลักประเภท 6MVx2 มีความจุ 180 ลบ.ม./ชม. ที่หัวเสาน้ำ 20 ม. และ 22 ลบ.ม./ชม. ที่หัวเสาน้ำ 125 ม. นอกจากนี้ ยังมีปั๊มน้ำท้องเรือแบบลูกสูบ TP-20/250 (20 ลบ.ม./ชม. ที่ระดับน้ำ 250 ม.) ในขั้นต้น รถถังทุ่นลอยน้ำตั้งอยู่ที่หัวเรือ แต่เมื่อถอดอาวุธยุทโธปกรณ์ปืนใหญ่ออก มันถูกถอดออก เป็นครั้งแรกในการปฏิบัติการต่อเรือใต้น้ำในประเทศ มีการใช้ตัวกันโคลงในแนวนอนในส่วนท้ายท้ายเรือ
โรงไฟฟ้าหลักของเรือประกอบด้วยเครื่องยนต์ดีเซลสองจังหวะ 37D ซึ่งเมื่อเปรียบเทียบกับเครื่องยนต์ดีเซล 1D ซึ่งอยู่ในเรือดำน้ำก่อนสงครามของซีรีส์ IX-bis และ XIII ที่มีกำลังเท่ากันมีน้ำหนักและขนาดน้อยกว่า และจำนวนกระบอกสูบ นอกจากนี้ยังมีอุปกรณ์ RDP ที่มีเพลาและวาล์วลอย (เป็นครั้งแรกในการต่อเรือดำน้ำของโซเวียต) มอเตอร์ไฟฟ้าหลักสองตัว PG-101, 1,350 แรงม้าแต่ละตัว ให้ความเร็วเต็ม PG-103 จำนวน 50 แรงม้าเท่ากัน - โหมดประหยัดและเรียกว่าการย่อง อย่างไรก็ตาม เครื่องยนต์ดีเซลสองจังหวะ 37D มีระดับเสียงที่สูงกว่า กลไกเส้นเพลาถูกติดตั้งบนโช้คอัพกันเสียง ED ของจังหวะเศรษฐกิจส่งการหมุนไปยังเพลาใบพัดผ่านเฟือง textrope ที่ยืดหยุ่นและเงียบด้วยอัตราทดเกียร์ 1: 3 และคลัตช์แรงเสียดทานของจังหวะเศรษฐกิจ ข้อต่อถอดการเชื่อมต่อด้วยลมยาง (SHPRM) ถูกวางไว้ระหว่างเครื่องยนต์ดีเซลและ HEM และข้อต่อแบบเดียวกันนี้ถูกวางไว้ระหว่าง HEM และเพลาขับ ซึ่งเชื่อมต่อกับเพลาใบพัดด้วยหน้าแปลนแข็ง ShPRM ถูกนำมาใช้เนื่องจากข้อได้เปรียบที่ชัดเจนเหนือข้อต่อประเภท BAMAG ที่ติดตั้งบนเรือดำน้ำของโครงการก่อนสงคราม - ทำให้สามารถดำเนินการเก็บเสียงของเครื่องยนต์ดีเซลและแนวเพลาได้ เพื่อติดตั้งแนวเพลาบนสลิปเวย์ ไม่ใช่หลังจาก การเปิดตัวเนื่องจากอนุญาตให้มีการแตกหักขนาดใหญ่ขึ้นอย่างมีนัยสำคัญและเพลาจับคู่การเคลื่อนตัวของแต่ละส่วนของเพลา
เพื่อให้แน่ใจว่าการทำงานของเครื่องยนต์ดีเซลพื้นผิวที่ความลึกระดับปริทรรศน์บนเรือเหล่านี้ มีอุปกรณ์ RDP พิเศษดังที่ได้กล่าวมาแล้ว ซึ่งเป็นเพลายืดหดได้สำหรับจ่ายอากาศบริสุทธิ์เข้าไปในตัวเรือ ซึ่งทำให้มั่นใจถึงการทำงานของเครื่องยนต์หลัก . ช่องอากาศของอุปกรณ์นี้ติดตั้งวาล์วลูกลอยเพื่อป้องกันไม่ให้น้ำไหลเข้าเมื่อส่วนบนท่วมหรือมีความลึก และก๊าซไอเสียจะถูกกำจัดออกทางเพลานิ่งซึ่งอยู่ที่ส่วนท้ายของรั้วโค่น ควรสังเกตว่าต้นแบบของ RDP เมื่อต้นศตวรรษได้รับการออกแบบโดย Gudim เจ้าหน้าที่เรือดำน้ำของเราและติดตั้งบนเรือดำน้ำรัสเซียลำหนึ่ง และเพียงไม่กี่ทศวรรษต่อมาในฐานะแบบจำลองที่ได้รับการพิสูจน์แล้วอุปกรณ์ดังกล่าวก็กลายเป็นที่รู้จักอย่างกว้างขวางภายใต้ชื่อ "snorkel" Periscopes, RDP, หางเสือแนวตั้งและแนวนอน, ฝาครอบ TA มีระบบขับเคลื่อนไฮดรอลิก เป็นครั้งแรกในกองเรือภายในประเทศ เรือเหล่านี้ใช้ระบบตัดเสียงแบบเงียบ (เฉพาะกับอากาศ) ติดตั้งช่องระบายอากาศพร้อมไอเสียลงไปในน้ำที่ส่งไปยังท้ายเรือ (โดยใช้เอฟเฟกต์การดูดของการไหลของน้ำนอกเรือ) และถังบำบัดน้ำเสีย ถูกติดตั้งสำหรับส้วม มันควรจะติดตั้งเครื่องทำความเย็นเพื่อทำให้อากาศในเรือดำน้ำเย็นลง แต่เนื่องจากประสิทธิภาพที่ไม่น่าพอใจจึงถูกถอดออก เรือ pr. 613 ถูกสร้างขึ้นโดยวิธีตำแหน่งการไหลโดยใช้การเชื่อมอัตโนมัติอย่างกว้างขวาง 04/11/1950 ที่โรงงานหมายเลข 444 (ปัจจุบันคือโรงงานต่อเรือ Chernomorsky) ใน Nikolaev การวางเรือดำน้ำนำ S-61 เกิดขึ้นโดยการติดตั้งบนทางเลื่อนของส่วนที่ 1 โดยรวมแล้วจนถึงปี 1957 มีการสร้าง DPL 72 แห่งของโครงการนี้ที่โรงงานแห่งนี้ ที่โรงงาน Krasnoye Sormovo * ใน Gorky เรือดำน้ำลำแรก - S-80 (คำสั่งซื้อ 801) - ถูกวางเมื่อวันที่ 13/03/1950 เปิดตัวเมื่อวันที่ 21/10/1950 โดยมีความพร้อมทางเทคนิค 70% ได้รับการทดสอบจนถึง 26.04.1951 การดำน้ำลึกเกิดขึ้นเมื่อวันที่ 09.06.1951 และใบรับรองการยอมรับได้รับการลงนามเมื่อวันที่ 02.12.1951 113 DPL ถูกสร้างขึ้นที่โรงงานแห่งนี้จนถึงปี 1956 นอกจากนี้ DPL 19 ลำและเรือดำน้ำ 11 ลำที่ SZLK ในปี 1954 - 1957 ในระหว่างการทดสอบเรือ S-61 และ S-80 มีการเปิดเผยข้อบกพร่องในการออกแบบดังต่อไปนี้:
น้ำนอกเรือเข้าไปในระบบไฮดรอลิก, สังเกตการกระแทกของไฮดรอลิก, ซีลและตัวกรองการทำความสะอาดทำได้ไม่ดี, การทำงานของเครื่องวาล์วระบายอากาศไม่น่าเชื่อถือ
อุปกรณ์ยืดหดได้ (ไม่มีคำแนะนำสำหรับพวกเขา);
อุณหภูมิที่เพิ่มขึ้นของตลับลูกปืนและข้อต่อบนเส้นเพลา การสั่นสะเทือนของกลไก ความล้มเหลวของกระบอกสูบของข้อต่อลมยาง และปัญหาในการเปลี่ยน
ในปีพ. ศ. 2497 เมื่อทำการทดสอบ DPL แบบอนุกรมตัวใดตัวหนึ่งปรากฎว่าในระหว่างการทำงานระยะสั้นของเครื่องยนต์ดีเซลซึ่งดำเนินต่อไปหลังจากปิดปีกนกแล้วส่วนผสมที่ระเบิดได้ก่อตัวขึ้นที่เต้าเสียบแก๊สและประกายไฟแรกที่เข้าไป เครื่องรับจากเครื่องยนต์ดีเซลเกิดการระเบิด จำเป็นต้องติดตั้งอุปกรณ์ปิดกั้นเพื่อขจัดปัญหานี้ สถานีข่าวกรองวิทยุ Nakat ยังไม่พร้อม เรือดำน้ำส่วนใหญ่ถูกส่งมอบให้กับกองเรือและติดตั้งบนเรือแล้วระหว่างปฏิบัติการ ในปี 1956 ตามการตัดสินใจของคณะรัฐมนตรีของสหภาพโซเวียต ปืนใหญ่ถูกถอดออกจากเรือ หลังจากนั้นความเร็วและระยะของการนำทางในตำแหน่งที่จมอยู่ใต้น้ำเพิ่มขึ้นเล็กน้อย ในกระบวนการซ่อมแซมตามกำหนดการ อาวุธวิทยุ-เทคนิคบางตัวอย่างถูกแทนที่บนเรือ โดยรวมแล้วควรจะสร้างเรือดำน้ำ 340 ลำสำหรับโครงการนี้ อันที่จริง 215 ลำถูกสร้างขึ้น (ซึ่งเป็นสถิติในการสร้างเรือดำน้ำต่อเนื่องในกองทัพเรือรัสเซีย) และครั้งหนึ่งพวกมันได้สร้างพื้นฐานของแร้งเรือดำน้ำโซเวียต . ในกระบวนการผลิตจำนวนมากมีการเปลี่ยนแปลงบางอย่างในโครงการโดยเฉพาะอย่างยิ่งในตำแหน่งของปืนใหญ่ - ส่วนหนึ่งของเรือดำน้ำมีปืนอยู่ด้านหน้าห้องโดยสารและด้านหลังห้องโดยสาร นอกจากนี้ ในเรือดำน้ำ 10 ลำแรกของซีรีส์ มีการติดตั้งเกราะป้องกันเขื่อนกันคลื่นหลายตัวที่ออกแบบโดย Lebedev ซึ่งมีช่องเปิดที่ใหญ่กว่าและแรงดึงน้อยกว่าเขื่อนกันคลื่นของการออกแบบทั่วไป อย่างไรก็ตามที่เขื่อนกันคลื่นเหล่านี้แม้จะมีการเสียรูปเล็กน้อย แต่เกราะป้องกันก็ติดขัดดังนั้นโดยเริ่มจากเรือลำที่ 6 ของซีรีส์จึงมีการติดตั้งเขื่อนกันคลื่นธรรมดา
แม้จะมีข้อบกพร่องอยู่บ้าง แต่เรือดำน้ำที่ค่อนข้างเรียบง่ายและน่าเชื่อถือลำนี้เป็นที่ชื่นชอบของเรือดำน้ำของกองทัพเรือสหภาพโซเวียต ด้วยความเรียบง่ายและในบางกรณีแม้แต่ความดั้งเดิมของอุปกรณ์ มันก็กลายเป็นหนึ่งในเรือดำน้ำที่เงียบที่สุดของกองทัพเรือสหภาพโซเวียต เรื่องราวชีวิตของ DPL pr.613 ในระดับหนึ่งสามารถเปรียบเทียบได้กับชีวิตของปืนไรเฟิลรัสเซีย 3 แถวรุ่น 1891 ที่มีชื่อเสียง ยังไม่โดดเด่น แต่เชื่อถือได้และเป็นที่รักของทหารรัสเซียทุกคน เป็นโครงการ 613 ที่นำความสำเร็จระหว่างประเทศครั้งแรกมาสู่การต่อเรือดำน้ำภายในประเทศ นี่เป็นโครงการเรือดำน้ำรัสเซียโครงการแรกที่นำไปใช้ในต่างประเทศ ในปีพ.ศ. 2497 โดยการตัดสินใจของรัฐบาล ภาพวาดการทำงานและเอกสารทางเทคนิคสำหรับ DPL ถูกโอนไปยังประเทศจีน ภายใต้เงื่อนไขของข้อตกลง เรือดำน้ำ 3 ลำแรกถูกสร้างขึ้นอย่างสมบูรณ์ในสหภาพโซเวียต จากนั้นจึงขนส่งไปยังสาธารณรัฐประชาชนจีนในรูปแบบแยกส่วน พวกเขารวมตัวกันในเซี่ยงไฮ้ที่อู่ต่อเรือจี่หนานและทดสอบในพอร์ตอาร์เทอร์เมื่อปลายปี 2500 เรือดำน้ำที่ตามมาทั้งหมดถูกสร้างขึ้นในจีน แต่สหภาพโซเวียตจัดหาเหล็ก อุปกรณ์ไฟฟ้า กลไกและอาวุธให้พวกเขา ในตอนท้ายของปี 1957 หลังจากประสบความสำเร็จในการทดสอบ DPL สามชุดแรก การเตรียมการสำหรับการสร้าง DPL ที่อู่ต่อเรือหวู่ฮั่นใน Hankou ก็เริ่มขึ้นในประเทศจีน เรือดำน้ำนำของโรงงานแห่งนี้ได้รับการทดสอบในพอร์ตอาร์เทอร์ตั้งแต่เดือนพฤศจิกายน พ.ศ. 2501 ถึงมกราคม พ.ศ. 2502 ถึงเวลานี้ มีการสร้างเรือดำน้ำแล้ว 15 ลำโดยโรงงานจี่หนานในพอร์ตอาร์เทอร์
เรือโครงการ 613 มักได้รับการอัพเกรดหรือสร้างใหม่ ดังนั้นในปี 27 เอกราชจึงเพิ่มขึ้นเป็น 45 วัน (โครงการ 613V) บน S-384 ความลึกของการยิงตอร์ปิโดถูกนำไปที่ 70 ม. (ตามข้อมูลต่างประเทศมีการทดสอบแบตเตอรี่ใหม่ในโครงการนี้) (โครงการ 61ZTs) บน S-43 พวกเขาตรวจสอบห้องกู้ภัยแบบผุดขึ้น (โครงการ?) เรือสี่ลำติดตั้งสถานีเรดาร์ตรวจการณ์ระยะไกล (โครงการ 640 (พัฒนา 640U และ 640T)) เรือของโครงการนี้ใช้สำหรับการทดสอบภาคสนามของอาวุธประเภทต่างๆ บางลำมีขีปนาวุธ DPL S-146 ได้รับการติดตั้งใหม่ตามโครงการ P-613 สำหรับการทดสอบขีปนาวุธล่องเรือของคอมเพล็กซ์ P-5 หลังจากเสร็จสิ้นการทดสอบเหล่านี้และการนำขีปนาวุธเข้าประจำการ เรือ S-44, S-46, S-69 S-80, S-158 และ S-162 ได้รับการติดตั้งอุปกรณ์ใหม่ภายใต้โครงการ 644 (644D, 644U, 644.7 ได้รับการพัฒนา) และได้รับ P-5 คอมเพล็กซ์และขีปนาวุธร่อน 2 ลูกและตู้คอนเทนเนอร์หลังโรงเก็บล้อ และ DPLS-61, S -64, S-142, S-152, S-155 และ S-164 ได้รับการติดตั้งใหม่ตามโครงการ 665 ที่พัฒนาขึ้นใน TsKB-112 และได้รับ P-5 คอมเพล็กซ์และขีปนาวุธ 4 ลูกที่วางอยู่ในรั้วห้องโดยสาร เรือดำน้ำ S-229 ถูกดัดแปลงตามโครงการ 613D4 เป็นเรือทดลองสำหรับทดสอบการยิงขีปนาวุธ R-21 ใต้น้ำ S-65 ได้รับการติดตั้งใหม่ตามโครงการ 613RВ สำหรับการทดสอบจรวด-ตอร์ปิโด DPL มากกว่า 30 ตัวได้รับการปรับปรุงให้ทันสมัยตามโครงการอื่น ๆ รวมถึง S-273 DPL ถูกดัดแปลงภายใต้โครงการ 613E "Katran" ด้วยโรงไฟฟ้าที่ไม่ขึ้นกับอากาศพร้อม ECG, S-141 ถูกดัดแปลงเพื่อทดสอบอุปกรณ์กู้ภัยประเภทใหม่ (โครงการ 613C), S-63 ถูกดัดแปลงเป็นเรือดำน้ำกู้ภัยภายใต้โครงการ 666 ในปี 1959 บน S-345 และ S-378 มีการทดสอบสถานีสื่อสารใต้น้ำที่มีเสียง ตามแหล่งข่าวต่างประเทศ: S-72 ได้รับการปรับปรุงให้ทันสมัยตามโครงการ 613AD (สำหรับการทดสอบอุปกรณ์อาวุธนำวิถีชนิดใหม่ - KR "Amethyst"), S-45 ใช้สำหรับการทดสอบการทำลายล้าง, โครงการ 613E ติดตั้งระบบทางอากาศ 400 กก. / cm2, โครงการ 613A - ติดตั้งขีปนาวุธต่อต้านเรือ P-15 (ออกแบบ), โครงการ 613B - เรือบรรทุกน้ำมันสำหรับเติมเครื่องบินทะเล B-10, โครงการ 613D5 - การทดสอบคอมเพล็กซ์ R-27, โครงการ 613D7 - การทดสอบ D-7 คอมเพล็กซ์, โครงการ 613Sh - การทดสอบโซนาร์ใต้น้ำแข็งและความเป็นไปได้ของการอยู่ใต้น้ำเป็นเวลานาน, โครงการ 613X - จรวด 15 กิโลตันในเหมืองเดียว, EP-613 - การพัฒนาก่อนโครงการของ P-613, โครงการ V -613 - การทดสอบจรวด R-11FM โครงการ 3P-613 - การทดสอบระบบขับเคลื่อนที่ไม่ขึ้นกับอากาศ โครงการ 613M - อุปกรณ์ใหม่สำหรับการทดสอบต้นแบบของแบตเตอรี่สังกะสีเงินและอุปกรณ์ไฟฟ้าขับเคลื่อนด้วยมอเตอร์ไฟฟ้าหลักกำลังสูง ด้วยฉนวนซิลิกอนอินทรีย์ นอกจากนี้ยังมี (ตามแหล่งข่าวต่างประเทศ) ชื่อโครงการ "ไม่คุ้นเคย" หลายชื่อ: 613M - หลังจากถอดปืนใหญ่ออกแล้ว 613I - รุ่นส่งออก
DPL เหล่านี้ถูกถ่ายโอนไปยังประเทศอื่นอย่างแข็งขัน โอนเรือดำน้ำ 10 ลำไปยังอียิปต์ 12 ลำไปยังอินโดนีเซีย (ชื่อที่ได้รับ: KRI Cakra (401), KRI Nanggala (402), KRI Nagabanda (403), KRI Trisula (404), KRI Nagarangsang (405), KRI Candrasa (406), KRI Alugoro (407), KRI Cundamani (408), KRI Hendrajala (409), KRI Pasopati (410), KRI ? (411), KRI Bramastra (412)), 4 - เกาหลีเหนือ, 3 - ซีเรีย, 4 - โปแลนด์, 2 - บัลแกเรีย 1 - คิวบาและเรืออีก 4 ลำถูกแอลเบเนียยึดที่ฐานใน Vlora ในช่วงเวลาแห่งการทำลายความสัมพันธ์ระหว่างโซเวียตกับแอลเบเนีย
เรือดำน้ำสองลำถูกโอนไปยังกระทรวงประมง ดัดแปลงเพื่อการวิจัยด้านสมุทรศาสตร์และการประมง ได้รับชื่อ "Severyanka" (S-148 ในปี 1957) และ "Slavyanka"
เรือประเภทนี้สูญหายสองลำ: S-178 - ในปี 1981 ในมหาสมุทรแปซิฟิกในช่องแคบ East Bosphorus และ S-80 (โครงการ 644) ในเดือนมกราคม 1961 ในทะเล Barents
การพัฒนาเพิ่มเติมของ DPL pr.613 คือการปรับเปลี่ยน DPL pr.633 ให้ดีขึ้น
เรือดำน้ำที่มีเครื่องยนต์ดีเซลเดียว. ในตอนต้นของศตวรรษที่ 20 ความคิดทั่วไปเกี่ยวกับโครงสร้างของโรงไฟฟ้าของเรือดำน้ำได้ก่อตัวขึ้นซึ่งยังคงมีอยู่ในระดับหนึ่งหรืออีกระดับหนึ่ง
เรากำลังพูดถึงการใช้เครื่องยนต์แยกกันสำหรับการนำทางบนผิวน้ำและใต้น้ำ
ในโหมดแรกจะมีการเปิดใช้งานเครื่องยนต์ดีเซลในโหมดที่สอง - เมื่อเคลื่อนที่ใต้น้ำ - มอเตอร์ไฟฟ้าที่ใช้พลังงานจากแบตเตอรี่ (การใช้เครื่องยนต์ประเภทที่ระบุไม่ได้มีไว้สำหรับเรือดำน้ำเท่านั้น)
ข้อเสียเปรียบหลักของแนวทางนี้ในการออกแบบเรือดำน้ำคือระยะเวลาที่เรือดำน้ำอยู่ใต้น้ำอย่างจำกัด เนื่องจากอายุการใช้งานแบตเตอรี่ที่น้อย
ตั้งแต่ทศวรรษที่ 1930 ทั้งในสหภาพโซเวียตและในเยอรมนี การพัฒนาเครื่องยนต์ประเภทใหม่สำหรับเรือดำน้ำอย่างเข้มข้นได้ริเริ่มขึ้นโดยมีวัตถุประสงค์เพียงประการเดียวในการเพิ่มระยะเวลาของการนำเรือดำน้ำใต้น้ำ
เครื่องยนต์ใหม่ควรจะให้การเคลื่อนที่ของเรือมีประสิทธิภาพเท่ากันทั้งเหนือและใต้น้ำ
เป็นผลให้วิศวกรชาวเยอรมันพัฒนาอุปกรณ์ดำน้ำพิเศษ (จาก Schnorkel เยอรมัน - ท่อหายใจ) และนักวิทยาศาสตร์โซเวียตพัฒนาอะนาล็อก - RDP (การถอดรหัส: การทำงานของเครื่องยนต์ภายใต้กล้องปริทรรศน์)
เนื่องจากความไม่สมบูรณ์ของการออกแบบ RDP แรก ก๊าซไอเสียจึงมักทะลุเข้าไปในห้องทำงานของเรือ
ต่อมามีการเปลี่ยนแปลงการออกแบบอย่างจริงจังกับ RDP ซึ่งปลดปล่อยเรือดำน้ำจากข้อบกพร่องนี้
อุปกรณ์นี้มีไว้สำหรับการชาร์จแบตเตอรี่จากเรือดำน้ำดีเซลที่ใช้งานได้เมื่ออยู่ภายใต้กล้องปริทรรศน์ และการเคลื่อนไหวของเรือดำน้ำด้วยความเร็วต่ำ (สูงสุด 5 นอต) ที่ความลึกของการดำน้ำปริทรรศน์ประมาณ 10 เมตร
แต่โหมดการนำทางของเรือดำน้ำนี้ถือได้ว่าเป็น "เทคโนโลยี" เนื่องจากไม่สามารถใช้สำหรับการโจมตีด้วยตอร์ปิโดได้
และรูปแบบการนำทางดังกล่าวโดยเฉพาะอย่างยิ่งในสภาวะที่มีพายุต้องใช้บุคลากรที่มีคุณสมบัติสูง
ด้วยคลื่นทะเล 4-5 จุด จึงเป็นเรื่องยากมากที่จะรักษาเรือให้อยู่ในระดับความลึกเพื่อให้เรือ RDP ทำงานตามปกติได้
ในการ "จู่โจม" ของคลื่นแต่ละครั้ง เรือจะ "ล้มเหลว" เพื่อป้องกันไม่ให้น้ำเข้าไปในห้องเครื่องดีเซล วาล์วลูกลอยจะปิดเพลา และการเข้าถึงเครื่องยนต์ดีเซลจะสิ้นสุดลง
เครื่องยนต์เริ่มรับอากาศจากห้องซึ่งนำไปสู่การสร้างแรงดันที่ลดลง
ในมนุษย์สิ่งนี้ส่งผลต่อความเจ็บปวดในหูและเลือดออกจากหูและจมูก เป็นเรื่องยากโดยเฉพาะอย่างยิ่งสำหรับบุคลากรของหน่วยดีเซล
เมื่อคลื่นออกเรือจะ "ลอยขึ้น" ความดันในห้องจะเป็นปกติ และด้วยการโจมตีแต่ละครั้งของคลื่น
ภาพที่ 1 นี่คือวิธีที่เรือดำน้ำขีปนาวุธ S-80 ของโครงการ 644 ซึ่งเสียชีวิตเมื่อวันที่ 27 มกราคม พ.ศ. 2504 เสียชีวิตเมื่อวันที่ 27 มกราคม พ.ศ. 2504 เนื่องจากความล้มเหลวของ RDP หลังจากยกขึ้นในปี พ.ศ. 2512
บางครั้งพวกเขาต้องลอยขึ้นเพื่อให้เพลาที่มีวาล์วลอยอยู่เหนือระดับน้ำทะเลซึ่งแน่นอนว่าเปิดโปงเรือ
สถานการณ์ฉุกเฉินขณะล่องเรือภายใต้ RDP อาจจบลงด้วยโศกนาฏกรรม
ลูกเรือหลายคนถูกไฟไหม้ และ V.S. ไม่สามารถบันทึก Dmitrievsky ได้
ในปีพ. ศ. 2489 งานในโครงการถูกโอนไปยัง TsKB-18 ซึ่งมีการย้ายนักออกแบบและนักพัฒนาที่ถูกปล่อยตัวออกจากคุก
บนพื้นฐานของการทดสอบในเชิงบวกโดยทั่วไป งานเริ่มต้นในการสร้างเรือดำน้ำทดลองกับโรงไฟฟ้า ED-KhPI
ในปีพ. ศ. 2491 เมื่องานเหล่านี้เสร็จสิ้นกลุ่มผู้เชี่ยวชาญได้รับรางวัลสตาลิน
ในปีพ. ศ. 2496 การทดสอบเรือดำน้ำด้วย ED-KhPI เสร็จสิ้น เรือได้รับการกำหนดตัวอักษรและตัวเลข M-254 ของโครงการ 615 และกลายเป็นส่วนหนึ่งของกองทัพเรือสหภาพโซเวียต
สร้างขึ้นบนพื้นฐานของมันตั้งแต่ปี 2499 เรือต่อเนื่องซึ่งได้รับมอบหมายหมายเลขโครงการ A615 เป็นของเรือดำน้ำตอร์ปิโดขนาดเล็ก
เมื่อออกแบบสิ่งเหล่านี้ หนึ่งในข้อกำหนดที่ขาดไม่ได้คือความจำเป็นในการขนส่งทางรถไฟ
เรือของโครงการ A615 นั้นเหนือกว่าเรือดำน้ำดีเซลอย่างมากในด้านความเร็ว (สามารถพัฒนาความเร็วได้ถึง 10 นอต) ในช่วงเวลาของการดำน้ำและความลึกในการดำน้ำสูงสุด
ในแง่ของสถาปัตยกรรม พวกมันมีขนาดครึ่งลำเรือ
หัวเรือและท้ายเรือส่วนท้ายเรือที่แข็งแรง (สุญญากาศ) ไม่ถูกบังด้วยลำเรือแสง (น้ำซึมผ่าน) ซึ่งสร้างรูปทรงภายนอกและทำหน้าที่รองรับถังอับเฉาหลัก (CB) ที่รับประกันการจุ่มและขึ้นของ เรือที่มีเหตุผลมากที่สุดตามแนวคิดสมัยใหม่ใช้โครงร่าง CGB
รถถังหกคันถูกวางไว้ในพื้นที่กระดานคู่ ซึ่งหมายเลข 2 และหมายเลข 5 ไม่มีคิงส์ตัน และหมายเลข 1 และหมายเลข 6 และรถถังของกลุ่มกลาง (หมายเลข 3 และหมายเลข 4) เป็นของคิงส์ตัน
Kingstons ในตอนท้ายของ CGB มีความสำคัญต่อการรับประกันพื้นผิวที่ไม่มีวันจม
เช่นเดียวกับเรือในประเทศลำอื่นๆ ความต้องการ "ช่องเดียว" ที่พื้นผิวไม่สามารถจมได้นั้นเป็นจริง (เรือดำน้ำยังคงลอยอยู่ได้เมื่อส่วนใดๆ
ตัวเรือที่แข็งแรงถูกแบ่งโดยผนังกั้นตามขวางออกเป็นเจ็ดช่อง กำแพงกั้นที่ จำกัด เสากลาง (ช่องที่สาม) ได้รับการออกแบบมาสำหรับแรงดัน 10 กก. / ซม. 2 ส่วนที่เหลือ - สำหรับ 1 กก. / ซม. 2
โรงไฟฟ้าดีเซลหลักสามเพลาตั้งอยู่ในช่องที่ 4, 5 และ 6 ของตัวถังแรงดัน
ในห้องหมายเลข 5 มีเครื่องยนต์ดีเซล M50 สองเครื่องที่มีความจุ 900 ลิตรต่อเครื่อง s. ทำงานที่เส้นด้านข้างของเพลาและในห้องหมายเลข 6 - เครื่องยนต์ดีเซล 32D หนึ่งเครื่องที่มีความจุ 900 แรงม้า ทำงานที่เส้นกึ่งกลางของเพลา
เครื่องยนต์ดีเซลทั้งหมดตั้งอยู่ในตู้ปิดกันก๊าซและสามารถทำงานได้ในวงจรปิด (ในตำแหน่งที่จมอยู่ใต้น้ำของเรือ)
เครื่องยนต์ดีเซล M50 ความเร็วเบาแบบเบาซึ่งพัฒนาขึ้นในคราวเดียวสามารถทำงานในโหมดการเผาไหม้ได้ ดังนั้นจึงมีอายุการใช้งานสั้น - 300 ชั่วโมง
เสาควบคุมตั้งอยู่ที่ผนังกั้นท้ายเรือของห้องที่ 4 มีการติดตั้งที่นั่งแบบพับได้ที่นี่สำหรับผู้ช่วยผู้บัญชาการของ 6Ch-5 และผู้ปฏิบัติงานด้านเคมี
เสาควบคุมดีเซล 32D ตั้งอยู่ในช่องที่ 5 พวกเขาได้รับพื้นผิวที่ยาวและหลักสูตรใต้น้ำ เช่นเดียวกับการชาร์จแบตเตอรี่และการนำทางภายใต้ RPD
เครื่องยนต์ดีเซลทั้งหมดติดตั้งบนโช้คอัพ และให้ความสนใจเป็นพิเศษกับการลดเสียงรบกวนเมื่อ 32D ทำงานในตำแหน่งใต้น้ำ (ในรอบปิด)
ออกซิเจนเหลวซึ่งช่วยให้การทำงานของเครื่องยนต์ถูกวางไว้ในช่องที่ 4 ในถังทองเหลืองทรงกระบอกสองถังที่มีความจุ 4.3 ตัน
ความดันใช้งานของออกซิเจนในถังคือ 13 atm ฉนวนกันความร้อนของถังมีขนตะกรัน
เหนือถังทั้งสองด้านจนถึงเพดานของช่อง มีแผ่นกั้นกรองก๊าซสองแผ่นพร้อมตัวดูดซับสารเคมีที่เป็นปูนขาว (ชิ้นละ 7.2 ตัน)

ภาพที่ 7 โครงการเรือดำน้ำ A615 บนผิวน้ำ
ออกซิเจนเหลวที่ผ่านเครื่องระเหยที่ให้ความร้อนด้วยไฟฟ้าซึ่งอยู่ในห้องที่ 4 ถูกจ่ายผ่านตัวควบคุมการจ่ายอัตโนมัติผ่านท่อไปยังเครื่องผสมก๊าซย้อนกลับ และหลังจากการผสม ส่วนผสมของก๊าซจะเข้าสู่เปลือกเครื่องยนต์ของเครื่องยนต์ดีเซล
ที่เส้นกึ่งกลางของเพลาในช่องหมายเลข 7 มีมอเตอร์ใบพัด PG-106 ความจุ 68 ลิตร กับ. ซึ่งสามารถทำงานบนแบตเตอรี่ 60 เซลล์ที่อยู่ในช่องเก็บที่ 2
โดยคำนึงถึงผลการทดสอบในทะเลแคสเปียน เมื่อสร้างโรงไฟฟ้า ED-KhPI สำหรับเรือ Project 615 นั้น ให้ความสนใจอย่างมากกับการตรวจสอบสถานะของสภาพแวดล้อมของก๊าซในเปลือกเครื่องยนต์
เราพัฒนาและติดตั้งเครื่องปรับปริมาณออกซิเจนอัตโนมัติ (AWP) วาล์วจ่ายออกซิเจนแบบปิดเร็ว และเครื่องวิเคราะห์ก๊าซเปอร์เซ็นต์ออกซิเจน
ระหว่างการทำงานของเครื่องยนต์ดีเซลในรอบปิด จะมีการรักษาระดับสุญญากาศของน้ำ 100 ถึง 500 มม. ไว้ในเปลือกหุ้มเครื่องยนต์ ศิลปะ.
ตัวกรองได้รับการติดตั้งในเปลือกของเครื่องยนต์ดีเซล 32D เพื่อกำจัดก๊าซพิษ เพื่อให้บุคลากรสามารถเข้าไปตรวจสอบในเปลือกหุ้มได้หลังจากที่เครื่องยนต์ดีเซลหยุดทำงานในตำแหน่งที่จมอยู่ใต้น้ำ
เรือดำน้ำที่มีเครื่องยนต์ดีเซลให้บริการ
การทดสอบของรัฐแสดงให้เห็นว่าลักษณะทางยุทธวิธีและยุทธวิธีของเรือดำน้ำ M-254 โครงการ 615 โดยพื้นฐานแล้วสอดคล้องกับข้อกำหนดแม้จะมีการเบี่ยงเบนและการถ่ายโอนการทดสอบจำนวนหนึ่ง (โดยเฉพาะอย่างยิ่งเพื่อกำหนดความเป็นอิสระใต้น้ำเต็มรูปแบบ) สำหรับระยะเวลาการปฏิบัติงานของ เรือดำน้ำในกองเรือ
ดังนั้น ระยะการแล่นของเรือดำน้ำที่ความเร็วพื้นผิวทางเศรษฐกิจภายใต้เครื่องยนต์ดีเซล 32D เฉลี่ยจึงน้อยกว่าทางเทคนิคที่ประกาศไว้ 1,000 ไมล์
นี่เป็นเพราะการล็อคใบพัดที่เส้นด้านข้างของเพลาซึ่งตามโครงการควรจะมีการหมุนฟรี

ภาพที่ 8 ลูกเรือในช่องตอร์ปิโดของเรือดำน้ำ M-352 ของโครงการ A615
จากข้อบกพร่องทั่วไปในการกระทำของคณะกรรมการของรัฐ มีดังต่อไปนี้:
- เพิ่มความผันผวนตามธรรมชาติของออกซิเจนเหลว (ช่วงการล่องเรือใต้น้ำมีให้เฉพาะในช่วง 5 วันแรกของการจัดเก็บออกซิเจนเหลว)
- ความแออัดยัดเยียดในห้องทำให้สภาพความเป็นอยู่ของบุคลากรแย่ลง
- ทรัพยากรไม่เพียงพอของเครื่องยนต์ดีเซล M
ในปี 1953 มีการตัดสินใจสร้างเรือดำน้ำ Project A815 หลายชุด
ตั้งแต่ปีนี้ มีการสร้างเรือ 29 ลำ โดย 23 ลำถูกสร้างขึ้นที่โรงงาน Sudomekh และอีก 6 ลำที่โรงงาน Admiralty Shipyards
เรือลำสุดท้ายของโครงการนี้ถูกรับเข้ากองทัพเรือในปี 2500
มันควรจะเริ่มสร้างพวกเขาในเคียฟ (ที่โรงงาน "Lenin's Forge") อย่างไรก็ตามความคิดนี้ต้องถูกยกเลิกเนื่องจากเป็นไปไม่ได้ที่จะขับเรือไปตาม Dniep \u200b\u200ber
มีการเปลี่ยนแปลงการออกแบบหลายอย่างในโครงการ A615 ที่มุ่งปรับปรุงระบบ IS เพิ่มความสามารถในการอยู่รอดของโรงไฟฟ้า และปรับปรุงความสามารถในการอยู่อาศัยของบุคลากรในเรือ
เพื่อเพิ่มระยะเวลาในการกักเก็บออกซิเจนในสถานะของเหลว แทนที่จะติดตั้งถังออกซิเจนสองถัง ถังหนึ่งได้รับการติดตั้งโดยยังคงความจุเท่าเดิม: พื้นผิวของถังเก็บ และทำให้การระเหยของออกซิเจนลดลง
ต่อมาพบว่าเรือดำน้ำใช้ออกซิเจนโดยตรงเพียง 4.5% สำหรับหลักสูตร ส่วนที่เหลือระเหยไป
ข้อมูลสมรรถนะหลัก (TTD) ของเรือดำน้ำโครงการ A615 แสดงไว้ด้านล่าง
เรือดำน้ำประเภทนี้ (เรือตอร์ปิโดขนาดเล็ก) ที่มีโรงไฟฟ้าทั่วไปมีความเร็วใต้น้ำ 7.5 นอตเป็นเวลาหนึ่งชั่วโมง
เรือโครงการ 615 มีข้อได้เปรียบที่สำคัญในแง่ของความเร็วใต้น้ำและเวลาที่ใช้ใต้น้ำ
ฐานการส่งมอบของโรงงานอยู่ในทาลลินน์การทดลองเรือดำน้ำในทะเลเกิดขึ้นในพื้นที่ครอนสตัดท์

ภาพที่ 9 โครงการเรือดำน้ำ A615 บนเรือลาดตระเวนเบา "Kirov" - ขบวนพาเหรดทางเรือใน Leningrad, อายุหกสิบเศษ
การเชื่อมต่อของเรือดำน้ำของโครงการ A615 ปรากฏในทะเลบอลติก (Libava, Lomonosov) ในทะเลดำ - 12 หน่วย (Balaklava ซึ่งเป็นที่ตั้งของ Naval Museum Complex)
ต่อจากนั้นเรือดำน้ำทั้งหมดของกองเรือบอลติกประเภทนี้กระจุกตัวอยู่ในเมือง Paldiski (เอสโตเนีย) ในกองพลเรือดำน้ำที่ 128
ในการเติมเชื้อเพลิงให้เรือดำน้ำด้วยออกซิเจนเหลวและตัวดูดซับสารเคมี ได้มีการสร้างเรือบรรทุกที่ไม่ได้ขับเคลื่อนด้วยตัวเองหลายลำนอกชายฝั่ง
เรือมีถังสำหรับเก็บออกซิเจนเหลว (45 ตันในระหว่างวันโดยไม่สูญเสีย)
เรือลำนี้ยังบรรทุกสารดูดซับสารเคมีอีก 32 ตัน การบรรจุออกซิเจนลงในถังใต้น้ำใช้เวลาสองชั่วโมง
เครื่องดูดซับสารเคมีที่ใช้แล้วจากเรือดำน้ำถูกปั๊มชายฝั่งดูดออกไป
หนึ่งในข้อบกพร่องร้ายแรงของเรือดำน้ำในโครงการนี้คือการระเบิดและความปลอดภัยจากอัคคีภัยไม่เพียงพอของโรงไฟฟ้าที่ทำงานในวงจรปิดของก๊าซออกซิเจน
ในระหว่างการทดสอบและการใช้งาน ไฟไหม้และการระเบิดขนาดเล็ก (“ป๊อป”) มักเกิดขึ้นในเปลือกเครื่องยนต์และตัวกรองแก๊ส
ดังนั้นในปี 1956 เกิดอุบัติเหตุร้ายแรงบนเรือดำน้ำ M-259 เมื่อมีผู้เสียชีวิต 4 รายและบาดเจ็บ 6 ราย ถูกไฟไหม้และเป็นพิษอันเป็นผลมาจากการระเบิดในห้องเครื่องของเครื่องยนต์ดีเซล 32D (ระหว่างการทำงานในที่ปิด รอบ).
ในปีต่อมา ผลจากไฟไหม้ที่จมอยู่ใต้น้ำในตู้ดีเซล 32D ใกล้เมืองทาลลินน์ เรือดำน้ำ M-256 เสียชีวิตพร้อมลูกเรือเกือบทั้งหมด (จากลูกเรือ 42 คน รอดชีวิต 7 คน)
โศกนาฏกรรมเหล่านี้บังคับให้ (ระหว่างปฏิบัติการของเรือดำน้ำในกองเรือ) ให้ความสำคัญกับปัญหาการระเบิดและความปลอดภัยจากอัคคีภัยของการติดตั้ง ED-KhPI อย่างจริงจังมากขึ้น
ในปี 1958 บนเรือดำน้ำ M-257 ที่ดัดแปลงเป็นแท่นลอยทดสอบได้เริ่มการทดสอบเพื่อทดสอบโหมดการทำงานที่เป็นไปได้ของเครื่องยนต์ดีเซลในรอบปิดที่อัตราออกซิเจนต่างๆ ที่จ่ายให้กับเปลือกเครื่องยนต์ โดยจำลองสภาวะสุดขั้วที่อาจนำไปสู่ การระเบิดและไฟไหม้ การสตาร์ทและหยุดเครื่องยนต์แบบสลับและแบบร่วมที่อัตราออกซิเจนที่แตกต่างกันในแผ่นกั้น

ภาพที่ 10 โครงการเรือดำน้ำ A615 ใน Kronstadt - ยุคเจ็ดสิบ
การทดสอบที่ดำเนินการแสดงให้เห็นว่าสาเหตุของการระเบิดที่เกิดขึ้นในเปลือกเครื่องยนต์และตัวกรองก๊าซคือความเข้มข้นของออกซิเจนในส่วนผสมของก๊าซที่ลดลงในระหว่างการทำงานของเครื่องยนต์ดีเซลแม้ว่าก่อนหน้านี้จะเชื่อว่าปริมาณออกซิเจนที่เพิ่มขึ้นเท่านั้น อันตรายหลัก
ดังนั้นสาเหตุของการระเบิดที่เกิดขึ้นในเปลือกเครื่องยนต์จึงชัดเจน
และถ้าก่อนหน้านี้พวกเขาพยายามที่จะกำจัดไฟที่เกิดขึ้นใหม่โดยการลดปริมาณออกซิเจนที่ตกค้างโดยไม่หยุดการทำงานของเครื่องยนต์ดีเซล ซึ่งนำไปสู่การปรากฏตัวของส่วนผสมที่ระเบิดได้ - ออกซิเจน คาร์บอนมอนอกไซด์ และไนโตรเจนออกไซด์ จากนั้นในคู่มือการใช้งานและ ในข้อกำหนดและอุปกรณ์ป้องกัน ข้อจำกัดที่เข้มงวดไม่เพียงแต่ค่าสูงสุด (26%) แต่ยังรวมถึงปริมาณออกซิเจนขั้นต่ำในตัวกลางที่เป็นก๊าซด้วย (18%)
ในเวลาเดียวกัน ยังมีการตรวจสอบประเด็นอื่นๆ อีกจำนวนมาก รวมถึงความเป็นไปได้ในการดับไฟในคอกโดยใช้การชลประทานน้ำ และยังทดสอบประสิทธิภาพของมาตรการเพื่อต่อสู้กับการแทรกซึมของสารพิษ (คาร์บอนมอนอกไซด์และไนโตรเจน) เข้าไปในช่องที่เอื้ออาศัยได้
จากผลการทดสอบเหล่านี้ ได้มีการพัฒนามาตรการเชิงโครงสร้างและองค์กรเพิ่มเติมเพื่อปรับปรุงความปลอดภัยในการระเบิดและอัคคีภัยของโรงไฟฟ้า ED-KhPI และระบบเพิ่มเติมสำหรับการป้องกันการระเบิดและไฟไหม้ และการตรวจสอบสภาพแวดล้อมที่เป็นก๊าซของช่องที่อาศัยได้
อย่างไรก็ตามบทวิจารณ์เชิงลบเกี่ยวกับโครงการเรือดำน้ำ A615 มีบทบาท อันตรายจากไฟไหม้ยังคงเป็นข้อเสียเปรียบหลัก ไม่ใช่เพื่ออะไรที่เรือเหล่านี้ในกองเรือได้รับฉายาว่า "ไฟแช็ก"
ตามประสบการณ์ในการดำเนินงานของเรือดำน้ำในโครงการ A615 ในที่สุดพวกเขาได้รับการยอมรับว่าไม่น่าพอใจพวกเขาเริ่มถูกถอนออกจากกองหนุนและในช่วงครึ่งแรกของปี 1970 เกือบทั้งหมดถูกถอนออกจากกองทัพเรือ .
บทส่งท้าย
เรือนำของโครงการในปี 1958 ถูกย้ายไปที่กองฝึกอบรม Kronstadt
ในปี 1960 มีการติดตั้งในอาณาเขตของโรงเรียน Higher Naval Diving School เป็นศูนย์ฝึกอบรม
เรือลำอื่นในซีรีส์นี้ได้รับการติดตั้งเป็นศูนย์ฝึกอบรมที่ Naval Engineering Institute ในเมือง Pushkin

รูปภาพ 11. สิ้นสุดการบริการ โครงการเรือดำน้ำ A615 ที่รอการตัด 2519
นอกจากเรือเหล่านี้แล้ว ลำหนึ่งยังถูกติดตั้งเป็นนิทรรศการริมทะเลในโอเดสซา และอีกลำหนึ่งถูกใช้เป็นฐานบัญชาการของป้อมปราการ Kronstadt ซึ่งถูกฝังอยู่ในพื้นดินมาเป็นเวลานาน
เรือที่เหลือในทศวรรษที่ 1980 เสร็จสิ้นการให้บริการที่ฐานตัดของ Vtorchermet
ชะตากรรมของผู้บัญชาการคนสุดท้ายของเรือดำน้ำ M-254 V.A. Nikolaev.
ในเดือนมกราคม พ.ศ. 2504 เขาเสียชีวิตบนเรือดำน้ำ S-80 พร้อมลูกเรือขณะฝึกงานบนเรือลำนี้
ข้อเสียที่สำคัญประการหนึ่งของเรือดำน้ำที่มีโรงไฟฟ้า ED-KhPI คือระยะเวลาการเก็บออกซิเจนเหลวบนเรือที่จำกัด แม้ว่าเรือดำน้ำจะอยู่ในฐานก็ตาม (เนื่องจากอยู่ห่างไกลจากฉนวนกันความร้อนในอุดมคติของถังออกซิเจน)
เพื่อกำจัดข้อเสียนี้ในปี พ.ศ. 2497-2498 โครงการทางเทคนิค "637" ได้รับการพัฒนาสำหรับเรือดำน้ำทดลองในโรงไฟฟ้าซึ่งการดูดซับก๊าซคาร์บอนไดออกไซด์ไอเสียและการเสริมสมรรถนะด้วยออกซิเจนได้ดำเนินการโดยใช้สารที่เป็นเม็ดแข็ง - โซเดียม ซูเปอร์ออกไซด์
ส่วนประกอบนี้ประกอบด้วยเม็ดแข็งที่มีออกซิเจนจับกับคาร์บอนไดออกไซด์
ในปี 1959 หนึ่งในเรือดำน้ำ Project A615 ถูกดัดแปลงเป็นโรงไฟฟ้าใหม่
อย่างไรก็ตาม ในเดือนพฤษภาคม พ.ศ. 2503 งานทั้งหมดในโครงการถูกยุติลงโดยไม่มีคำอธิบายใดๆ
ในเมือง Severodvinsk การทดสอบเรือดำน้ำนิวเคลียร์ในประเทศลำแรกเสร็จสิ้น
ประวัติศาสตร์ของเรือดำน้ำที่มีเครื่องยนต์ดีเซลเดียวสิ้นสุดลงด้วยรูปร่างหน้าตาของมัน ยุคใหม่ของเรือดำน้ำได้เริ่มขึ้นแล้ว
เครื่องยนต์ดีเซลใต้น้ำ
อุปกรณ์สำหรับการทำงานของดีเซลใต้น้ำ (RDP)
อุปกรณ์ยืดหดได้สำหรับเรือดำน้ำสำหรับจ่ายอากาศในชั้นบรรยากาศไปยังห้องดีเซลและกำจัดก๊าซไอเสียที่ตำแหน่งปริทรรศน์ของเรือดำน้ำ เพื่อป้องกันไม่ให้เรือดำน้ำถูกน้ำท่วมผ่านทางท่อไอเสียและท่อไอดี วาล์วจะถูกติดตั้งบนวาล์วซึ่งจะปิดโดยอัตโนมัติเมื่อคลื่นท่วมหรือเรือดำน้ำจมอยู่ใต้น้ำ RDP ช่วยให้เรือดำน้ำดีเซลเพิ่มระยะการแล่น ชาร์จแบตเตอรี่ เติมอากาศอัด และระบายอากาศในห้องโดยไม่ต้องเปิดผิว ซึ่งเป็นการเพิ่มความลับ
เอ็ดเวิร์ด พจนานุกรมทหารเรืออธิบาย, 2010
ดูว่า "อุปกรณ์สำหรับการทำงานของเครื่องยนต์ดีเซลใต้น้ำ" คืออะไรในพจนานุกรมอื่น ๆ :
อุปกรณ์สำหรับการทำงานของดีเซลใต้น้ำ (RDP)- อุปกรณ์สำหรับเครื่องยนต์ดีเซลหลักที่รับรองการทำงานของเครื่องยนต์ดีเซลใต้น้ำที่ระดับความลึกปริทรรศน์ โดยการดึงอากาศผ่านเพลาที่ยืดหดได้ และปล่อยก๊าซไอเสียลงสู่น้ำผ่านทางช่องจ่ายก๊าซพิเศษ RDP อนุญาตให้เพิ่มเรือดำน้ำดีเซล ... ... พจนานุกรมคำศัพท์ทางทหาร
คำนี้มีคำย่อว่า "PLA" แต่ความหมายอื่นสามารถเข้าใจได้ด้วยคำย่อนี้ ดูที่ PLA (ความหมาย) มีตัวย่อ "APL" สำหรับคำนี้ แต่ความหมายอื่นสามารถเข้าใจได้โดยตัวย่อนี้: ดู APL ... ... Wikipedia
เรือดำน้ำที่ระดับความลึกปริทรรศน์ T 90 พร้อมท่อหายใจที่ยกขึ้นเพื่อเอาชนะสิ่งกีดขวางทางน้ำที่ด้านล่างของท่อหายใจ (ไม่ใช่ ... Wikipedia
อุปกรณ์เรือ (เรือ) เป็นคำทั่วไปแบบดั้งเดิมที่รวมถึงอุปกรณ์เรือที่มีคุณสมบัติบางอย่าง ได้แก่ วัตถุ "จุด" อีกคำหนึ่งที่มักใช้ร่วมกับอุปกรณ์เรือ ... ... Wikipedia
ความเร็วของเรือ (ความเร็วของเรือ)- ตัวเลขเท่ากับระยะทางที่เรือเดินทางต่อหน่วยเวลา (หน่วยเป็นนอต ไมล์ต่อชั่วโมง) กำหนดโดยความล่าช้า สำหรับเรือผิวน้ำมี: ใหญ่ที่สุด (prn กำลังสูงสุดของโรงไฟฟ้า); เต็ม (ที่กำลังไฟเต็มเล็กน้อย ... พจนานุกรมคำศัพท์ทางทหาร
ชุดกลไกเสริม ท่อพร้อมข้อต่อ ถัง เครื่องมือวัด ตัวควบคุม และอุปกรณ์อื่น ๆ ที่ออกแบบมาเพื่อวัตถุประสงค์เฉพาะ ระบบเรือดำน้ำรวมถึงระบบ ... ... พจนานุกรมทางทะเล
ประวัติของเรือดำน้ำเหล่านี้ซึ่งปรากฏเมื่อต้นศตวรรษที่ผ่านมายังคงดำเนินต่อไปจนถึงทุกวันนี้ อาจเป็นเพราะแม้ในยุคที่เครื่องมือค้นหาอิเล็กทรอนิกส์มีการพัฒนาอย่างรวดเร็ว เรือเหล่านี้ยังคงรักษาข้อได้เปรียบหลักเหนือกองเรือผิวน้ำ นั่นคือความสามารถในการปฏิบัติการอย่างลับๆ เส้นทางสำหรับเรือดำน้ำโซเวียตรุ่นแรกที่มีเครื่องยนต์ดีเซลเปิดขึ้นโดยโครงการต่อเรือในปี 2472
ลูกหัวปีของกองเรือดำน้ำโซเวียต เรือประเภท "D" ("Decembrist") ถูกสร้างขึ้นภายใต้การแนะนำของวิศวกรผู้มีความสามารถ B. M. Malinin การกระจัดของเรือเหล่านี้ที่มีความยาว 76.6 ม. คือ 933/1354 ตัน บนผิวน้ำเรือแล่นด้วยความเร็ว 14.6 นอต ใต้น้ำ เธอพัฒนาได้ 9.5 นอต
การปรากฏตัวของเรือประเภท "D" กลายเป็นความรู้สึก เรือดำน้ำยุคก่อนการปฏิวัติของรัสเซียทุกลำเป็นลำเดียว เป็นเรื่องยากมากที่จะบรรจุ "การบรรจุ" ทั้งหมดของเรือและลูกเรือลงในลำเรือเดียว "Decembrist" ก็มีอาคารสองหลัง ภายนอก - เบาและภายใน - ทนทาน ตัวถังที่แข็งแรงถูกแบ่งออกเป็นเจ็ดช่องพร้อมฝากั้นน้ำ ซึ่งมีบ่อพักน้ำทรงกลมพร้อมประตูปิดเร็ว
ตัวเรือสองลำทำให้เรือลอยตัวได้ดี ช่องว่างระหว่างพวกเขาถูกแบ่งโดยผนังกั้นตามขวางเป็นถังอับเฉาหลักหกคู่ ในตำแหน่งที่จมอยู่ใต้น้ำ พวกเขาเติมน้ำผ่านคิงสโตนที่เปิดอยู่ - วาล์วของการออกแบบพิเศษ เมื่อขึ้นผิวน้ำ บัลลาสต์น้ำถูกเอาออก (เป่า) ออกจากถังด้วยลมอัด
"Decembrists" ไม่เพียง แต่ "คงอยู่" จนถึงมหาสงครามแห่งความรักชาติเท่านั้น แต่ยังสามารถอวดอ้างว่าปฏิบัติการที่ประสบความสำเร็จมากมาย เรือดำน้ำแต่ละลำติดอาวุธด้วยท่อตอร์ปิโดแปดท่อ รวมถึงปืนสองกระบอกที่มีลำกล้องขนาด 100 และ 45 มม. ลูกเรือของเรือซึ่งมี 53 คนก็เพียงพอที่จะรับมือกับภารกิจการรบได้ ความลึกสูงสุดของเรือดำน้ำถึง 90 ม. และความเป็นอิสระในการนำทางของเรือลำสุดท้ายของซีรีส์นี้เพิ่มขึ้นเป็น 40 วัน เรือ "D" ได้รับการพิจารณาอย่างถูกต้องว่าเป็นเรือที่ดีและมีข้อบกพร่องเล็กน้อย สิ่งสำคัญคือการวางเชื้อเพลิงส่วนใหญ่ไว้นอกตัวถังแรงดัน หากถังเชื้อเพลิงได้รับความเสียหายจากการระเบิดของประจุลึก เรือสามารถตรวจพบได้ง่ายตามเส้นทางเชื้อเพลิง
ในปี พ.ศ. 2473-2477 อุตสาหกรรมการต่อเรือมีความเชี่ยวชาญในการผลิตเรือเก็บทุ่นระเบิดใต้น้ำของ L-type - Leninets และเรือดำน้ำขนาดเล็กของ M-type - Malyutka ซึ่งให้บริการที่ยอดเยี่ยมในช่วงสงคราม
เรือดำน้ำขนาดเล็กประเภท "M" - "Malyutka", สหภาพโซเวียต

เรือดำน้ำโซเวียตในยุคก่อนสงครามที่พบมากที่สุดคือเรือดำน้ำประเภท Shch Pike ด้วยขนาดที่เล็กและการกระจัดเพียง 650/750 ตัน Pike จึงมีความน่าเชื่อถือมาก แต่ไม่สามารถอวดอ้างพลังทางเทคนิคได้ งานหลักที่ฝ่ายกำหนดสำหรับนักออกแบบของ "ไพค์" คือการลดต้นทุนการผลิตสูงสุดซึ่งไม่ได้ส่งผลดีที่สุดต่อข้อมูลทางยุทธวิธีและทางเทคนิค ความเร็วลดลงระยะการล่องเรือลดลงเหลือ 1,350 ไมล์และเอกราชเพียง 20 วัน นอกจากนี้ยังได้ลดกำลังปืนใหญ่ลงด้วย ปืนใหญ่ 45 มม. สองกระบอกและปืนกล 7.62 มม. สองกระบอกวางอยู่บน "หอก"
ประเภทเรือดำน้ำ "หอก"

นักออกแบบโซเวียตหลายคนรู้สึกทึ่งกับแนวคิดในการสร้างเรือดำน้ำขนาดเล็กพิเศษ เรือดำน้ำที่รัก?! สะดวกและราคาไม่แพงมาก เรือดำน้ำขนาดเล็กสามารถไปถึงที่เกิดเหตุการสู้รบได้เร็วกว่าเรือดำน้ำขนาดใหญ่มาก วิธีการขนส่งใด ๆ ก็เหมาะสมสำหรับการจัดส่ง: เรือลำอื่น รถไฟ และแม้แต่เครื่องบิน หนึ่งในเรือดำน้ำแคระลำแรกคือ Pygmy ซึ่งออกแบบโดย V. I. Bekauri การกำจัดของเรือดำน้ำนี้ไม่เกิน 19 ตัน มันมีความเร็ว 6/5 นอต, ระยะการแล่น 290/18 ไมล์, ความลึกของการดำน้ำสูงสุด 30 เมตร, อิสระ 3 วันและลูกเรือ 4 คน ท่อตอร์ปิโดสองท่อและปืนกลวางอยู่บนเรือดำน้ำ ต้นแบบทนทานต่อการทดสอบทั้งหมดอย่างสมเกียรติ แต่ไม่เคยผลิตจำนวนมาก วิศวกรที่มีความสามารถถูกกดขี่อย่างไม่เป็นธรรม และโครงการก็ถูกลดทอนลง
ดีไซเนอร์ V. L. Brzezinski เสนอเรือดำน้ำสองรุ่น “Bloham. โดยพื้นฐานแล้วมันเป็นเรือตอร์ปิโด "ดำน้ำ" ที่มีระวางขับน้ำประมาณ 30 ตันติดอาวุธด้วยตอร์ปิโดสองลูกและปืนกลพร้อมลูกเรือ 3 คน จากการคำนวณของนักออกแบบความเร็วใต้น้ำของ "หมัด" ควรอยู่ที่ 4 นอตเท่านั้น แต่เหนือน้ำเรือต้องรีบด้วยความเร็ว 30-35 นอต อนิจจาโครงการเรือดำน้ำขนาดเล็กนี้ยังไม่เกิดขึ้นจริง
อาจเป็นไปได้ว่าในประเทศหนึ่งนักออกแบบไม่กระตือรือร้นที่จะสร้างเครื่องยนต์ดีเซลทั่วไปสำหรับเรือดำน้ำผิวน้ำและใต้น้ำเหมือนในรัสเซียยุคก่อนสงคราม เครื่องยนต์ดังกล่าวจะแก้ปัญหาหลายอย่างพร้อมกัน
ในปีพ.ศ. 2481 สหภาพโซเวียตได้เริ่มสร้างเครื่องยนต์สร้างพลังงานใหม่สำหรับเรือดำน้ำ ซึ่งใช้ออกซิเจนเหลว งานเกี่ยวกับการเปิดตัวเครื่องยนต์ปฏิรูปยังคงดำเนินต่อไปในช่วงมหาสงครามแห่งความรักชาติ แต่พวกเขาถูกขัดจังหวะด้วยการปิดล้อมของเลนินกราด
ก่อนสงครามโลกครั้งที่ 2 เรือดำน้ำยังคงได้รับบทบาทเป็นผู้ช่วยเหลือสำหรับเรือผิวน้ำขนาดใหญ่ ในบางประเทศพวกเขาถึงกับสร้างเรือดำน้ำ "ฝูงบิน" พวกเขาควรจะไปกับฝูงเรือรบบนผิวน้ำ ตัวอย่างของเรือดำน้ำดังกล่าวคือเรือดำน้ำ Iskra P-3
เรือก่อนสงครามลำสุดท้ายเริ่มติดตั้งอาวุธที่ทรงพลังกว่า เพิ่มความเร็วและระยะของพวกมัน แต่มหาอำนาจทางทะเลไม่ได้คิดถึงการเติมกองเรือดำน้ำอย่างเด็ดขาด เพราะพวกเขายังประเมินความสามารถของเรือเหล่านี้ต่ำเกินไป
ดังนั้น ในช่วงก่อนเกิดสงคราม สหรัฐอเมริกามีเรือดำน้ำ 94 ลำ และนาซีเยอรมนีซึ่งกระตือรือร้นในการสู้รบ มีเรือดำน้ำ 57 ลำ เป็นเรื่องไร้สาระ ในระหว่างการสู้รบพวกนาซีต้องสร้างเรือดำน้ำอย่างเร่งด่วน พวกเขาสามารถเพิ่มกองเรือดำน้ำได้ถึง 20 เท่า! Podnalegili เกี่ยวกับการสร้างเรือดำน้ำและพลังอื่น ๆ ในช่วงสงคราม อิตาลี "ยึด" เรือได้ 41 ลำ ญี่ปุ่น - 129 ลำ อังกฤษ - 165 ลำ และสหรัฐอเมริกา - เรือดำน้ำมากถึง 203 ลำ!
แม้จะมีความจริงที่ว่าการพัฒนาที่มีความสามารถมากมายของนักออกแบบโซเวียตกำลังรวบรวมฝุ่นในเอกสารสำคัญ แต่ในช่วงเริ่มต้นของมหาสงครามแห่งความรักชาติโซเวียตมีเรือดำน้ำ 212 ลำซึ่งมากกว่าทุกรัฐที่เข้าร่วมสงคราม ข้อได้เปรียบที่เถียงไม่ได้ของเรือดำน้ำโซเวียต "S" และ "K" ซึ่งเป็นการผลิตแบบต่อเนื่องที่เชี่ยวชาญในช่วงต้นทศวรรษที่ 40 คือช่วงการล่องเรือขนาดใหญ่ การเดินเรือที่ดีขึ้น และการปกครองตนเอง ความลึกของการดำน้ำลึกถึงเครื่องหมาย 100 เมตรซึ่งคิดไม่ถึงเมื่อไม่กี่ปีที่ผ่านมา ความเร็วพื้นผิวก็เพิ่มขึ้นเช่นกัน - ตอนนี้อยู่ที่ 20 นอต เรือลาดตระเวณ K-class ขนาดใหญ่ติดอาวุธที่ฟัน บนเรือมีท่อตอร์ปิโด 10 ท่อตอร์ปิโดจำนวนมากและปืนคาลิเบอร์ดั้งเดิมสี่กระบอกในปีนั้น - 45 และ 100 มม. นอกจากนี้ เรือดำน้ำประเภท K แต่ละลำยังมีทุ่นระเบิดอีก 20 ทุ่นระเบิดสำหรับวางทุ่นระเบิด
ประเภทเรือดำน้ำ "K"

ในช่วงปีแรก ๆ ของสงคราม เรือดำน้ำที่มองไม่เห็นและเข้าใจยากจึงปฏิบัติการโดยแทบไม่ได้รับการยกเว้นโทษ มันดำเนินต่อไปได้ไม่นาน ผู้ที่มีจิตใจดีที่สุดแห่งอำนาจสงครามเริ่มค้นหาวิธีการตรวจจับใต้น้ำที่มีประสิทธิภาพ ในปี พ.ศ. 2486 การบินเริ่มปฏิบัติการต่อต้านเรือดำน้ำอย่างแข็งขัน ซึ่งติดตั้งเรดาร์และอาวุธใหม่ ซึ่งเป็นหายนะสำหรับเรือดำน้ำ เรดาร์ทำให้สามารถตรวจจับได้ไม่เพียงแค่ตัวเรือดำน้ำเท่านั้น แต่ยังรวมถึงความลึกของการจมน้ำด้วย ตอนนี้ค่าความลึกที่ลดลงจากเครื่องบินไม่ได้ลดลงแบบสุ่มสี่สุ่มห้า เรือดำน้ำมีช่วงเวลาที่ยากลำบาก แม้แต่การอยู่บนผิวน้ำเพียงชั่วครู่ก็เป็นอันตราย ปืนต่อสู้อากาศยานลำกล้องเล็กของพวกเขาไม่สามารถรับมือกับการโจมตีครั้งใหญ่จากทางอากาศได้
วิธีที่ดีในการออกจากทางตันที่เรือดำน้ำเข้ามาอย่างกระทันหันคือการพัฒนาอุปกรณ์พิเศษที่ช่วยให้เรือสามารถอยู่ใต้น้ำได้เป็นเวลานานในระดับความลึกตื้นภายใต้เครื่องยนต์ดีเซล จริงอยู่เธอเคลื่อนไหวด้วยท่า "เต่า" - เพียง 5-6 นอต แต่ก็เป็นความคิดที่ดี! อุปกรณ์กู้ภัยประกอบด้วยท่อสองท่อที่เชื่อมต่อเป็นโครงสร้างทั่วไป ซึ่งสามารถต่อจากใต้น้ำไปยังผิวน้ำทะเลได้ อากาศภายนอกถูกจ่ายผ่านท่อหนึ่ง และอีกท่อทำหน้าที่กำจัดก๊าซไอเสีย ชาวเยอรมันเรียกระบบนี้ว่า "snorkel" เราได้กำหนดชื่ออื่นให้กับมัน - RDP ("งานดีเซลใต้น้ำ") ซึ่งมีชีวิตรอดเช่นเดียวกับระบบมาจนถึงทุกวันนี้
RDP ไม่ใช่ยาครอบจักรวาลสำหรับความเจ็บป่วยทั้งหมด เรือดำน้ำที่ติดตั้งอุปกรณ์นี้ตรวจจับได้ยากด้วยเครื่องระบุตำแหน่ง แต่ไฮโดรโฟนตรวจจับได้ง่ายจากเสียงเครื่องยนต์ดีเซลที่กำลังทำงานอยู่
มีทางออกทางเดียวคือทำให้เรือดำน้ำหลบหลีกได้มากขึ้นโดยเพิ่มความเร็วใต้น้ำ สิ่งนี้ต้องการการพัฒนามอเตอร์ไฟฟ้าที่ทรงพลังหลายพันแรงม้าและแบตเตอรี่ความจุสูง นอกจากนี้ เพื่อปรับปรุงประสิทธิภาพการขับขี่ ตัวเรือได้รับการปรับปรุงให้เพรียวลมมากขึ้น เสาอากาศและท่อหายใจหดได้ ตอร์ปิโดอะคูสติกพิเศษปรากฏขึ้นซึ่งไม่ต้องการการเล็งที่แม่นยำ แต่ตรวจจับเสียงเครื่องยนต์ของเรือข้าศึกได้
เรดาร์ไม่ได้เป็นเพียงหายนะของเรือดำน้ำเท่านั้น ติดตั้งบนเรือ oi กลายเป็นแหล่งที่มาของพลังที่ไม่มีใครเทียบได้ของเรือดำน้ำ ตัวอย่างนี้คือการโจมตีด้วยตอร์ปิโดที่ประสบความสำเร็จโดยเรือดำน้ำอเมริกัน Haddock ซึ่งติดตามและจมลงในคืนที่มืดมนของเดือนสิงหาคมในปี 1942 เรือบรรทุกเครื่องบิน Teishii Maru ของญี่ปุ่น
ลักษณะเฉพาะของลักษณะประจำชาติไม่สามารถส่งผลกระทบต่อการต่อเรือดำน้ำของญี่ปุ่นได้ ประเภทหลักของเรือดำน้ำญี่ปุ่นในช่วงสงครามโลกครั้งที่สองคือเรือดำน้ำแคระ ซึ่งบรรจุโดยลูกเรือของเครื่องบินทิ้งระเบิดพลีชีพกามิกาเซ่ ระหว่างปี พ.ศ. 2484 ถึง พ.ศ. 2488 ชาวญี่ปุ่นได้สร้างเรือจำนวน 207 ลำในจำนวนนี้ โดยปกติแล้วเรือดำน้ำขนาดใหญ่บนดาดฟ้าซึ่งมี "ทารก" เพียงพาเธอไปที่สนามรบ หลังจากเปิดตัว เรือดำน้ำแคระก็รีบเข้าโจมตีอย่างไม่เกรงกลัว แม้ว่าคู่ต่อสู้ของเธอจะเป็นเรือประจัญบานขนาดใหญ่ก็ตาม ข้อได้เปรียบของเรือแคระนั้นชัดเจน - เนื่องจากรูปทรงที่เล็กของพวกมันจึงไม่สามารถตรวจจับได้ด้วยเรดาร์ บ่อยครั้งที่ระบบไฮโดรอะคูสติกไม่มีพลัง
เรือดำน้ำญี่ปุ่น "I-400"

แต่ในญี่ปุ่นไม่ได้สร้างแต่เรือลำเล็กๆ ญี่ปุ่นสามารถสร้างเรือดำน้ำที่ใหญ่ที่สุดในสงครามโลกครั้งที่สอง เรือดำน้ำประเภท "1-400" ที่มีระวางขับน้ำ 6,600 ตันยังคงอยู่ในประวัติศาสตร์ของการต่อเรือทางทหารในฐานะเรือที่ใหญ่ที่สุดที่มีการติดตั้งดีเซลไฟฟ้า อาวุธยุทโธปกรณ์ของเรือดำน้ำขนาด 122 เมตรเหล่านี้ประกอบด้วยท่อตอร์ปิโดแปดท่อที่มีลำกล้อง 533 มม. ปืนลำกล้องขนาด 127 มม. หนึ่งกระบอก ปืนต่อต้านอากาศยานขนาด 25 มม. สิบกระบอก และแม้แต่ ... เครื่องบินโจมตีสามลำ
ปืนใหญ่อัตตาจรค่อย ๆ หายไปจากเรือดำน้ำ เห็นได้ชัดว่าเหตุผลคือความหายากของการใช้งาน จริงมีกรณีพิเศษ ด้วยเหตุนี้ ชาวอเมริกันจึงใช้ปืนใต้น้ำยิงถล่มชายฝั่งญี่ปุ่นหลายครั้ง
เรือรบเกือบ 300 ลำ รวมถึงเรือประจัญบาน 3 ลำ เรือลาดตระเวน 28 ลำ เรือบรรทุกเครื่องบิน 16 ลำ และเรือพิฆาต 91 ลำ ถูกสังหารโดยตอร์ปิโดเรือดำน้ำของเยอรมันและพันธมิตร สหรัฐอเมริกา อังกฤษ และรัฐที่เป็นกลาง (ไม่รวมสหภาพโซเวียต) สูญเสียเรือสินค้า 2,770 ลำเนื่องจากเรือดำน้ำ เป็นที่น่าสนใจว่ามากกว่าครึ่งหนึ่งต้องทนทุกข์ทรมานจากการบินและเรือผิวน้ำทำลายเพียงหนึ่งในสิบของจำนวนเรือที่จมโดยเรือดำน้ำ
อังกฤษประสบความสำเร็จมากที่สุดในสงครามทุ่นระเบิด เรือดำน้ำอังกฤษวางทุ่นระเบิดกว่า 3,000 ทุ่นระเบิดในน่านน้ำของศัตรู ซึ่งเรือรบและเรือขนส่งของศัตรู 59 ลำบินขึ้นไปในอากาศ และอีก 8 ลำได้รับความเสียหาย ความสำเร็จดังกล่าวไม่ได้เป็นเพียงหลักฐานของคุณสมบัติการต่อสู้ที่ยอดเยี่ยมของเรือดำน้ำอังกฤษเท่านั้น มันได้รับการอำนวยความสะดวกด้วยบรรยากาศของความลับที่เข้มงวดซึ่งห่อหุ้มปฏิบัติการทางทหารของอังกฤษ
ในปีพ. ศ. 2487 ชาวเยอรมันพยายามที่จะแก้แค้นครั้งสุดท้ายได้สั่งซื้อเรือดำน้ำขนาดใหญ่ของซีรีส์ XXI ซึ่งเป็นเรือดำน้ำลำแรกซึ่งมีความเร็วใต้น้ำ (17 นอต) เกินความเร็วพื้นผิว (16 นอต) เรือลำใหม่ที่มีระวางขับน้ำ 1620/1827 ตันไม่เพียงแต่สร้างความประทับใจให้กับความคล่องแคล่วเท่านั้น แต่ยังรวมถึงความลึกของการดำน้ำที่สูงถึง 200 เมตรอีกด้วย เรือดำน้ำมากกว่า 220 ลำในซีรีส์นี้พร้อมท่อตอร์ปิโดหกท่อและตอร์ปิโดที่น่าประทับใจซึ่งเติมให้กับกองเรือเยอรมันเป็นกองกำลังที่น่าเกรงขาม แต่ผลของสงครามได้ข้อสรุปมาก่อนแล้ว
นาซีเยอรมนีพ่ายแพ้ และประเทศที่ได้รับชัยชนะได้รับถ้วยรางวัลอันล้ำค่า ซึ่งเป็นประสบการณ์ทางเทคนิคทางทหารของชาวเยอรมันที่สั่งสมมาในช่วงสงคราม อังกฤษ ฝรั่งเศส และสหรัฐอเมริกา ได้นำซีรีส์ XXI มาใช้เป็นต้นแบบในการสร้างกองเรือดำน้ำแห่งอนาคต บนเรือดำน้ำ พวกเขาติดตั้ง RDP แบบยืดหดได้ รวมถึงมอเตอร์ไฟฟ้าและแบตเตอรี่อันทรงพลัง ซึ่งเพิ่มความเร็วของเรือดำน้ำลำแรกหลังสงครามเป็น 16 นอต
เรือดำน้ำดีเซลยังคงอยู่ร่วมกันอย่างสันติกับคู่แข่งนิวเคลียร์ที่ก้าวหน้ากว่า ผู้เชี่ยวชาญด้านการทหารหลายคนเชื่อว่าเรือดำน้ำดีเซล-ไฟฟ้าที่ติดตั้งตอร์ปิโดและขีปนาวุธสามารถต่อสู้กับเรือนิวเคลียร์ได้สำเร็จ โดยเฉพาะในพื้นที่จำกัด ในน้ำตื้น และที่ทางออกของฐานทัพเรือ
นอกจากนี้ เรือที่ใช้น้ำมันดีเซลลำล่าสุดยังเงียบกว่าเรือที่ใช้พลังงานนิวเคลียร์มาก และตรวจจับได้ยากกว่ามาก ถึงกระนั้นมหาอำนาจตะวันตกที่ทรงพลังที่สุด - สหรัฐอเมริกา อังกฤษ และฝรั่งเศส - ลดการผลิตเรือดำน้ำดีเซล แม้ว่าพวกเขาจะไม่ละทิ้งการใช้งานก็ตาม เรืออเมริกันลำสุดท้ายประเภทนี้คือเรือดำน้ำ Varbel ที่เปิดตัวในปี 2500-2502 ระวางขับน้ำบนพื้นผิวของพวกมันคือ 2,895 ตัน และความเร็วสูงสุดใต้น้ำถึง 25 นอต ด้วยการดำน้ำลึก 210 ม. พวกเขามีระยะการล่องเรือภายใต้ RDP 18,000 ไมล์ สิ่งเหล่านี้เป็นผลลัพธ์ที่ดีมาก
ชุดสุดท้ายที่สำคัญของเรือดำน้ำดีเซลชั้น Oberon 13 ลำของกองเรืออังกฤษเข้าประจำการในภายหลัง - ในปี 2504-2506 เรือเหล่านี้เป็นเรือรบทรงพลังที่ติดอาวุธด้วยท่อตอร์ปิโดแปดท่อและมีความเร็วใต้น้ำ 17 นอต
แต่เยอรมนียังคงสร้างเรือดำน้ำดีเซลต่อไปจนถึงปลายทศวรรษที่ 1970 โครงการเรือดำน้ำ 209 ลำของเธอมีระวางขับน้ำค่อนข้างน้อย - 1100/1210 ตันและความเร็วใต้น้ำ 22 นอต ชาวเยอรมันสร้างเรือไม่เพียงเพื่อตัวเองเท่านั้น พวกเขาพบลูกค้าในตุรกี กรีซ อาร์เจนตินา และโคลอมเบียที่อยู่ห่างไกลออกไป
ขีปนาวุธล่องเรือ Lun เป็นอาวุธจรวดชนิดแรกที่เรือดำน้ำดีเซลของอเมริกาที่มีระวางขับน้ำมากถึง 2,500 ตันเริ่มติดตั้งหลังสงครามพวกเขาเปิดตัวบนพื้นผิวจากการติดตั้งที่ตั้งอยู่บนดาดฟ้าของเรือดำน้ำ การใช้จรวดเรกูลัส 1 ขั้นสูงจำเป็นต้องมีการเปลี่ยนแปลงที่สำคัญในการออกแบบเรือดำน้ำ ตัวเรียกใช้งานใหม่และโรงเก็บเครื่องบินพิเศษสำหรับเก็บขีปนาวุธปรากฏขึ้น เรือดำน้ำลำแรกที่ติดอาวุธขีปนาวุธดังกล่าวเข้าประจำการในปี พ.ศ. 2498-2499 ดังนั้นเรือดำน้ำขีปนาวุธดีเซลไฟฟ้าประเภทใหม่จึงปรากฏในกองทัพเรือสหรัฐฯ ตอนแรกมีสี่คน - "Carbonero", "Cask", "Tania" และ "Varbero" แต่การทดสอบครั้งแรกของพวกเขาแสดงให้เห็นว่าการเปลี่ยนเรือดำน้ำธรรมดาให้เป็นเรือบรรทุกขีปนาวุธนั้นเป็นทางตันอย่างชัดเจน จำเป็นต้องสร้างเรือจรวดที่มีโครงสร้างพิเศษซึ่งระบบขีปนาวุธทั้งหมดจะถูกวางไว้ภายในตัวเรือ สำหรับเรือดำน้ำรุ่นเก่ามีพื้นที่ไม่เพียงพอสำหรับสิ่งนี้ นอกจากนี้ความเร็วของเรือลดลงและนอกจากนี้ความคล่องแคล่วยังแย่ลงอีกด้วย
เกรย์แบ็กและโกรว์เลอร์ซึ่งมีระวางขับน้ำ 2287/3638 ตัน ซึ่งเข้าประจำการในปี 2501 กลายเป็นผู้บุกเบิกเครื่องยิงจรวดที่สร้างขึ้นเป็นพิเศษ , และขึ้นสู่ผิวน้ำได้ด้วยความเร็วสูงถึง 20 นอต เรือดำน้ำแต่ละลำบรรทุกขีปนาวุธ Regulus 2 สองลูกซึ่งวางไว้ที่หัวเรือในโรงเก็บเครื่องบินพิเศษ


